云上OpenClaw快速接入飞书指南
如果此时此刻您还不了解 OpenClaw(原 Clawdbot),或是了解但还没有开始部署 OpenClaw(原 Clawdbot),建议您先参考云上 OpenClaw(原 Clawdbot)一键秒级部署指南来完成 OpenClaw 接入飞书之前的部署操作。
本文主要介绍如何在腾讯云轻量应用服务器 Lighthouse 中部署完成 OpenClaw 后,配置接入飞书机器人。
前置准备工作
在正式开始为 OpenClaw(原 Clawdbot,中文名俗称“龙虾”)配置接入飞书机器人之前,请您依次检查如下事项是否准备完成:
- 您已经拥有一个飞书账号
- 是否已经在轻量应用服务器 Lighthouse 实例中部署了 OpenClaw,如果暂时还没有,建议:
- 前往腾讯云 Lighthouse 购买服务器并安装 OpenClaw
- 或使用 OpenClaw 专属活动优惠部署
- 参考「云上 OpenClaw 一键秒级部署指南」
- 若模板创建时间早于 2026-02-11,建议更新版本
接入飞书
注意:以下步骤针对已在轻量应用服务器中部署OpenClaw,从零开始配置接入飞书的情况,如果有部分步骤已完成,可酌情跳过。
本教程提供两种接入方式——“快捷配置”和“ 手动配置”;
如果您是小白用户,我们强烈建议您使选择“快捷配置”,仅需扫码即可完成配置;
如果您对飞书机器人权限有特殊需求,请选择“手动配置”;特别说明:如果您没有发布/审核机器人的权限,请您选择手动配置,并在管理员批准机器人发布后在配置面板输入AppID与App Secret。
接入方式一(快捷配置)
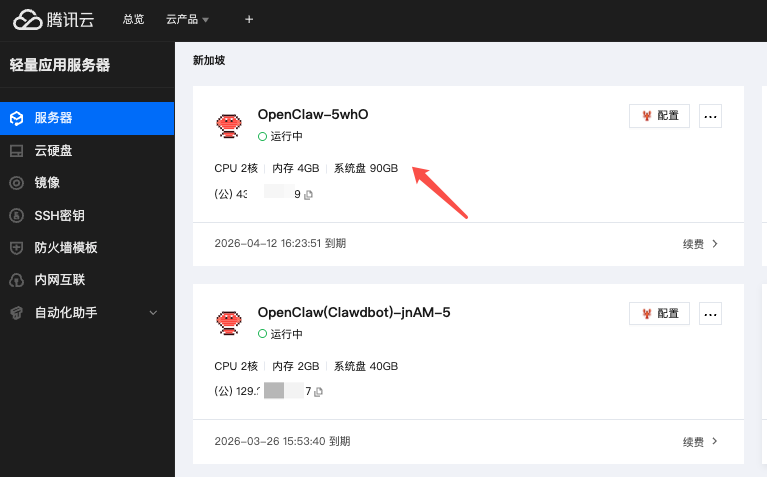
进入控制台
进入腾讯云控制台 → Lighthouse 实例 → 管理实例
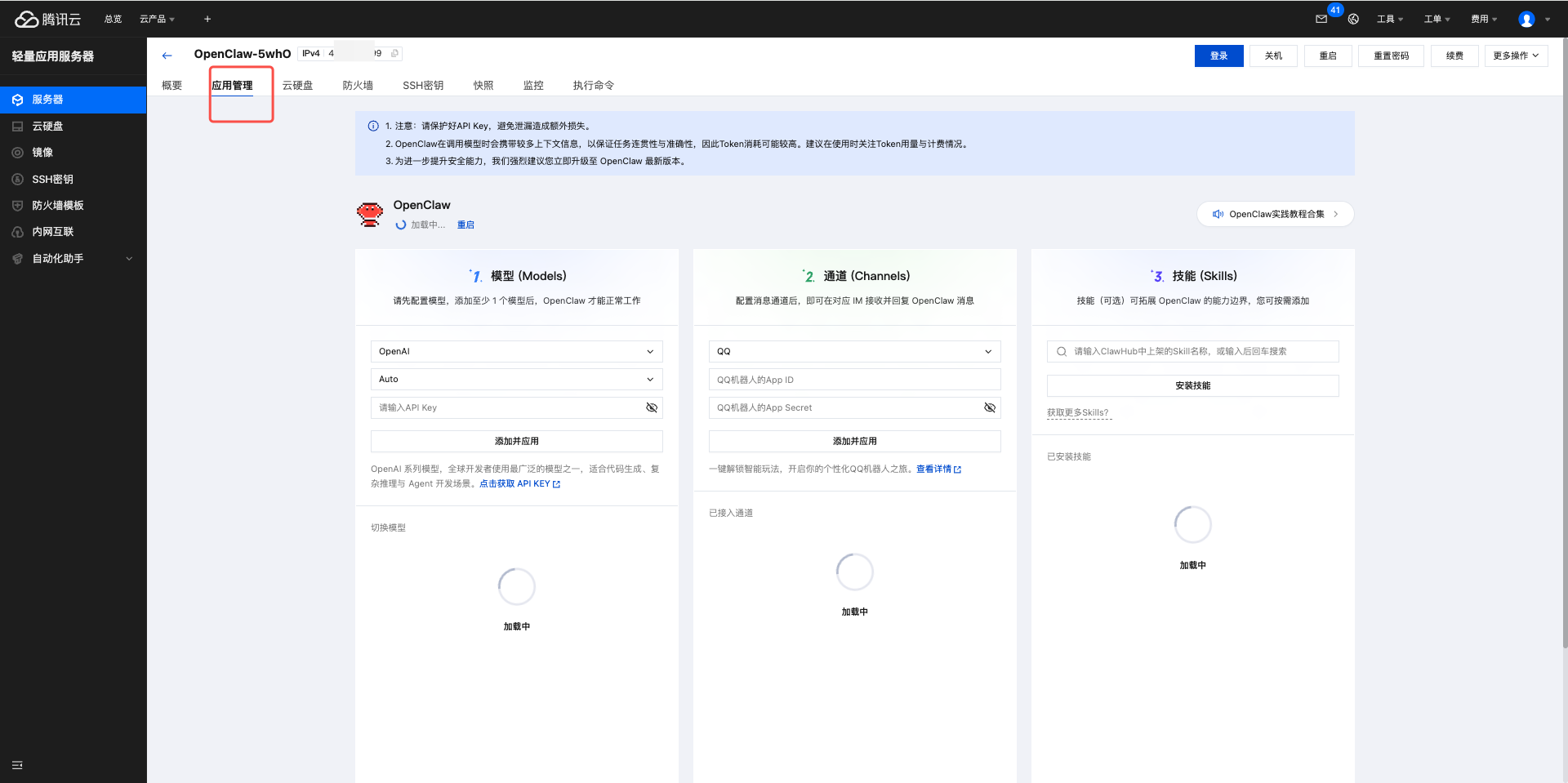
进入应用管理
进入 Lighthouse 应用管理页面
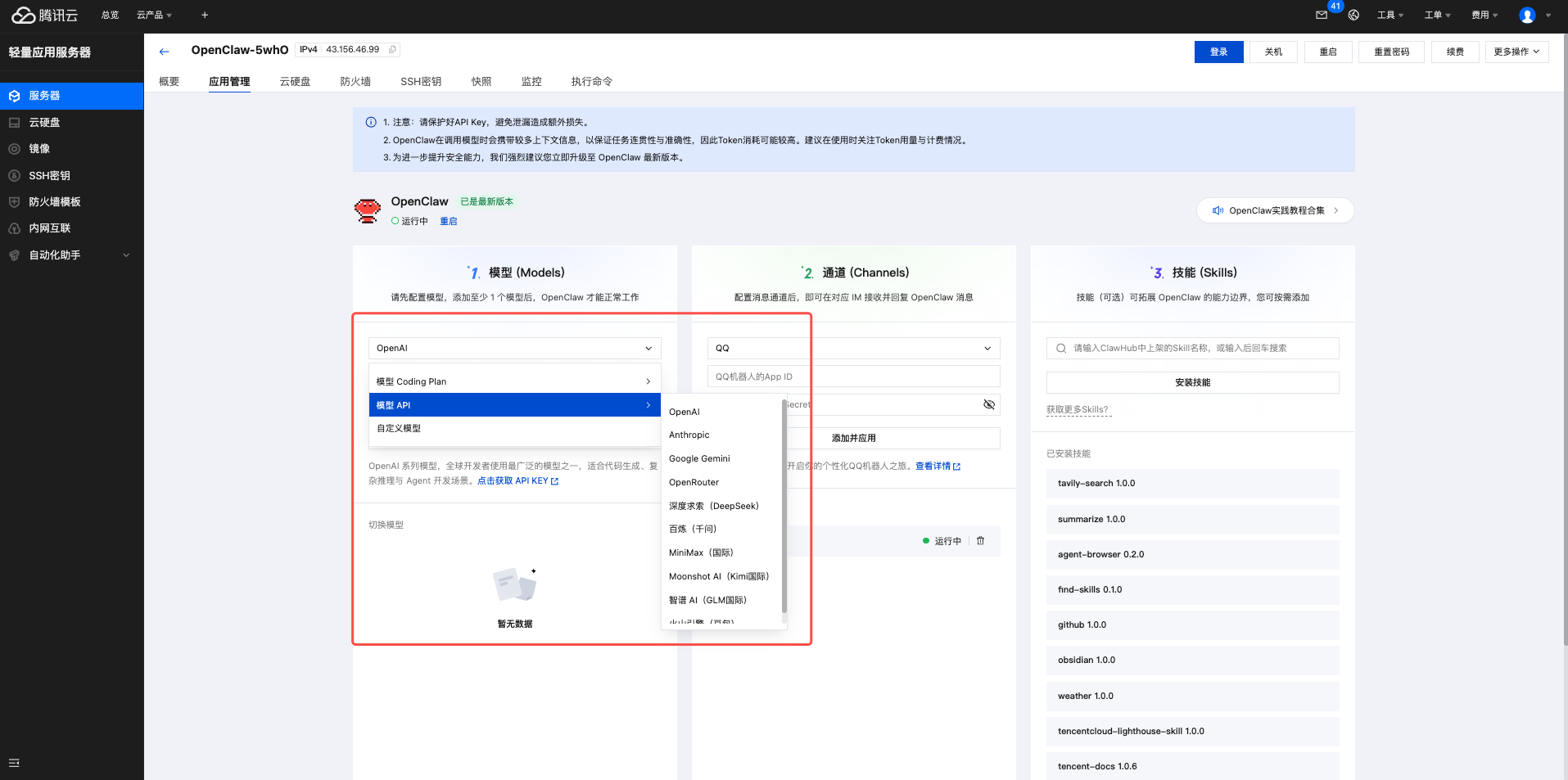
模型配置
配置模型 API Key

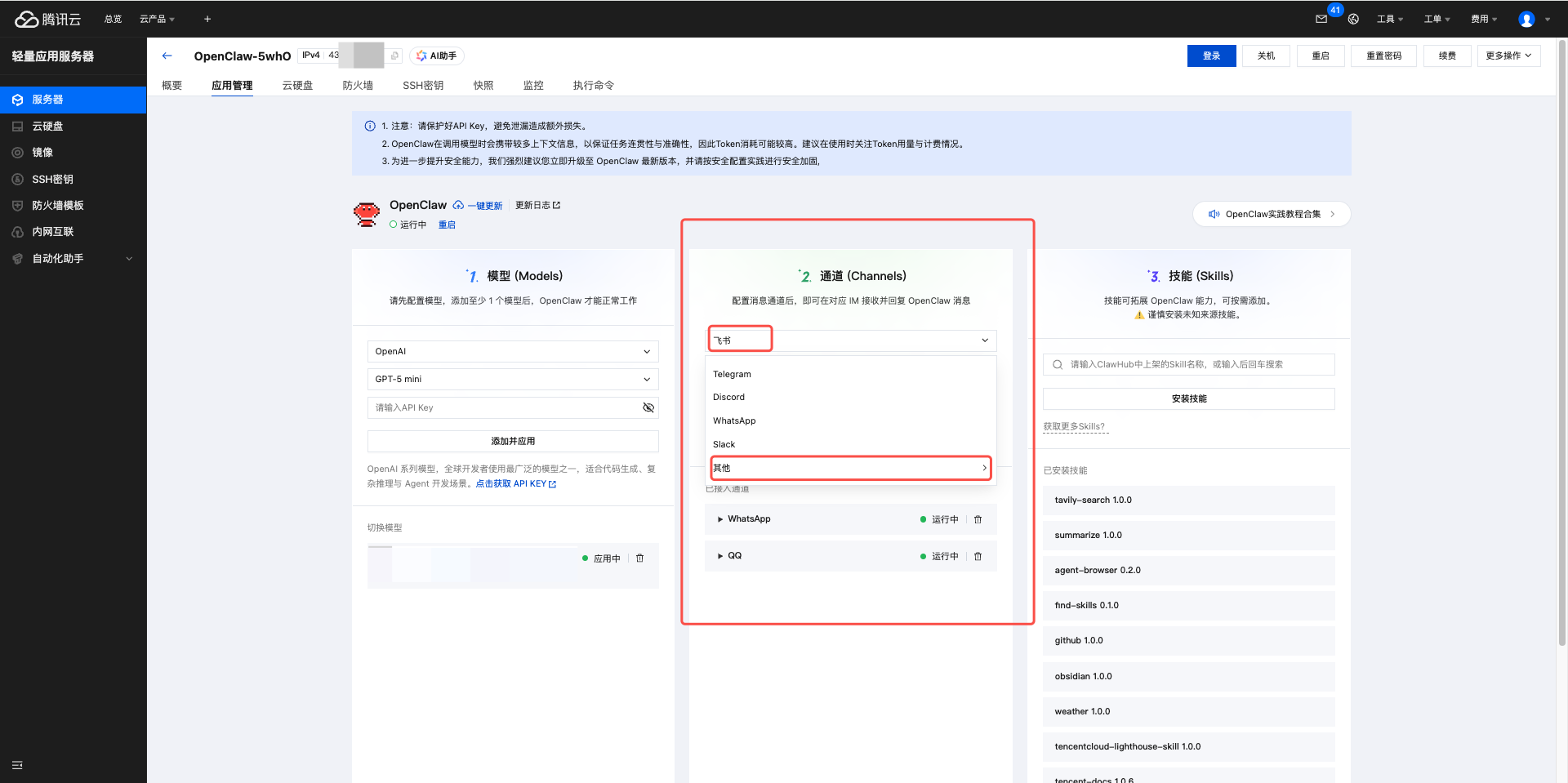
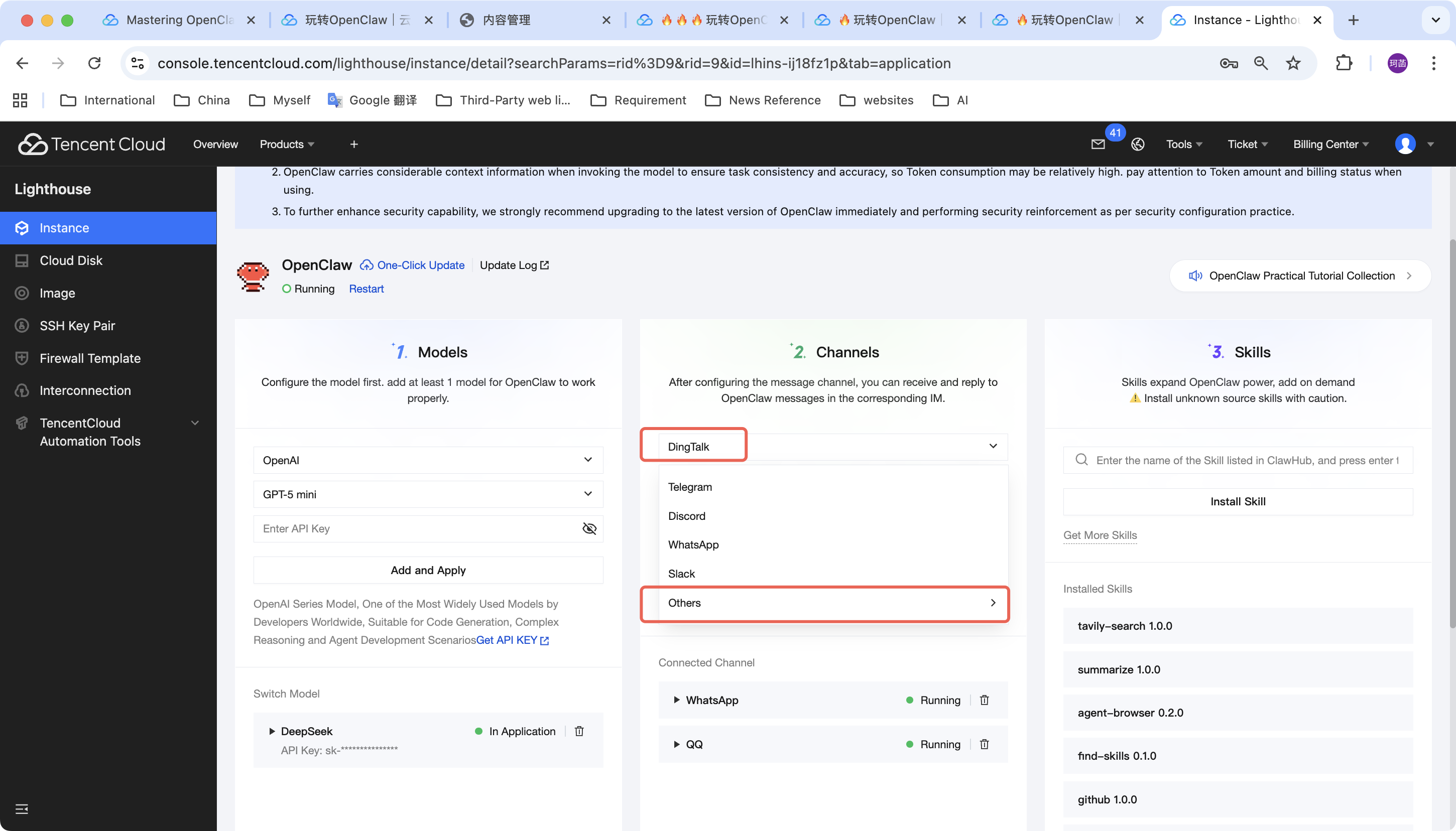
选择通道
飞书
快捷配置 → 前往授权

扫码配置
使用飞书App扫描弹出的配置二维码;
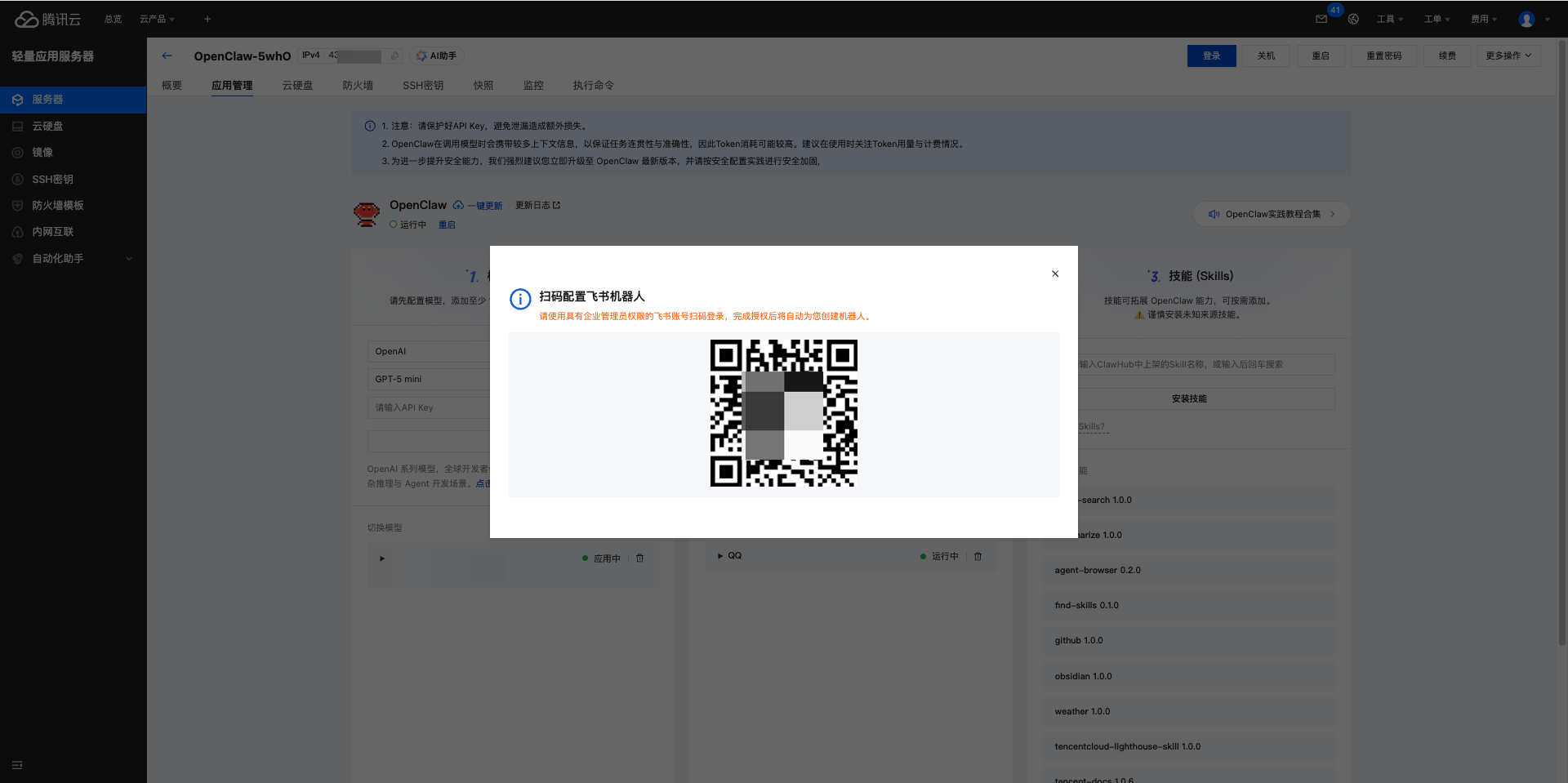
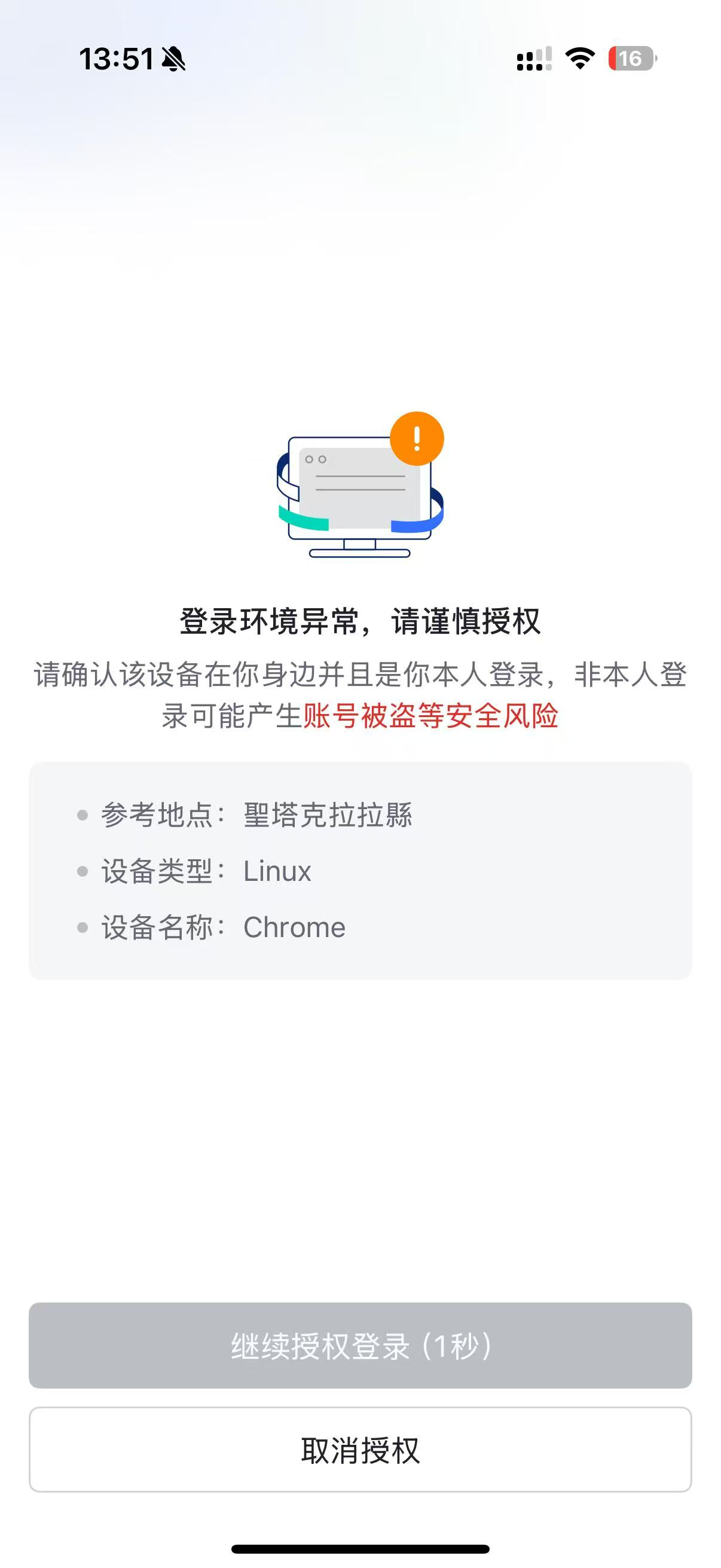
扫码后,在飞书App内选择“继续授权登录”;
完成登录后,返回腾讯轻量云Lighthouse应用管理页面,点击弹窗中的“我已完成扫码”;

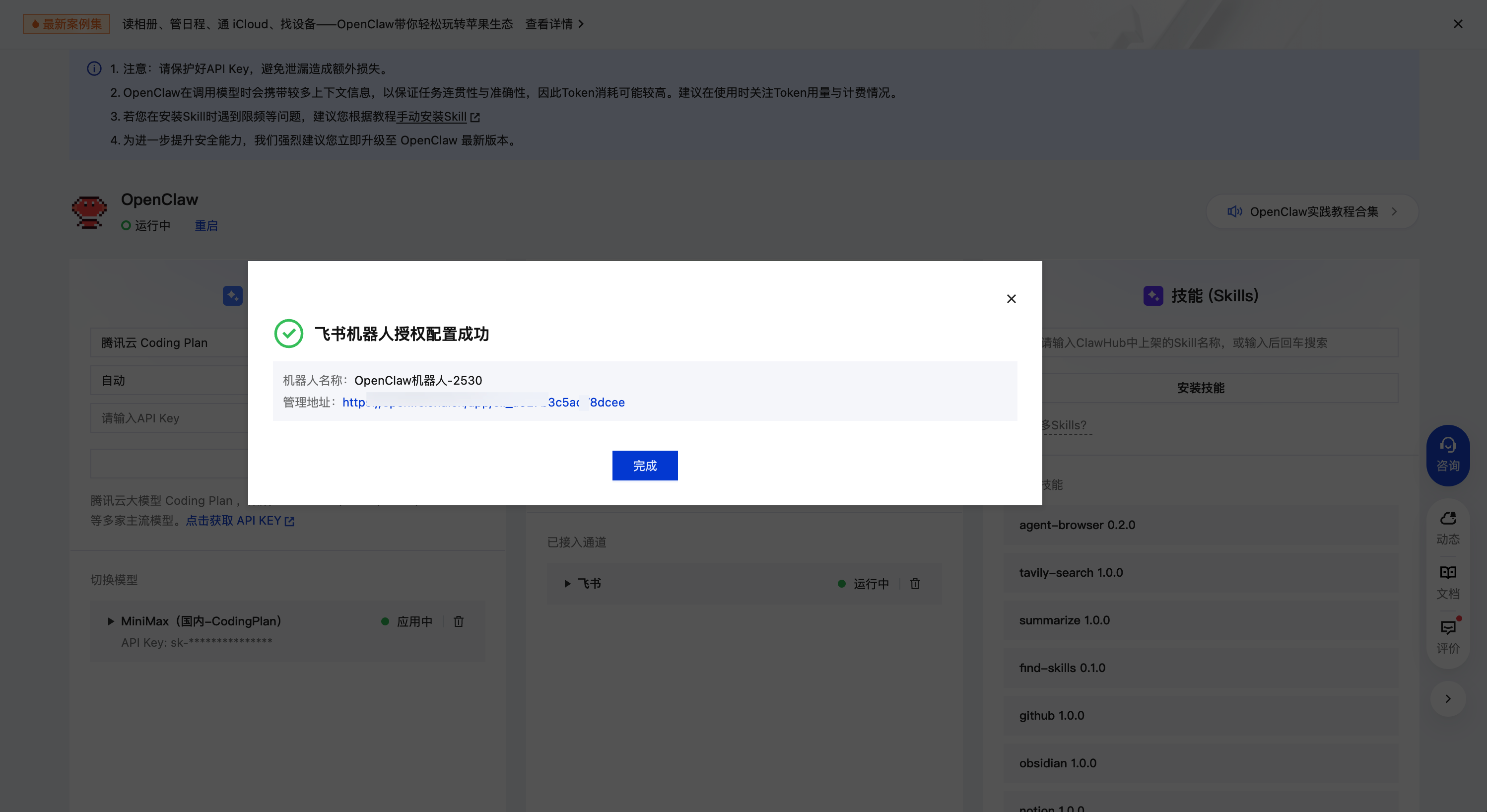
随后飞书机器人将自动进行配置,等待弹出“飞书机器人授权配置成功”后,则代表快捷配置已完成;
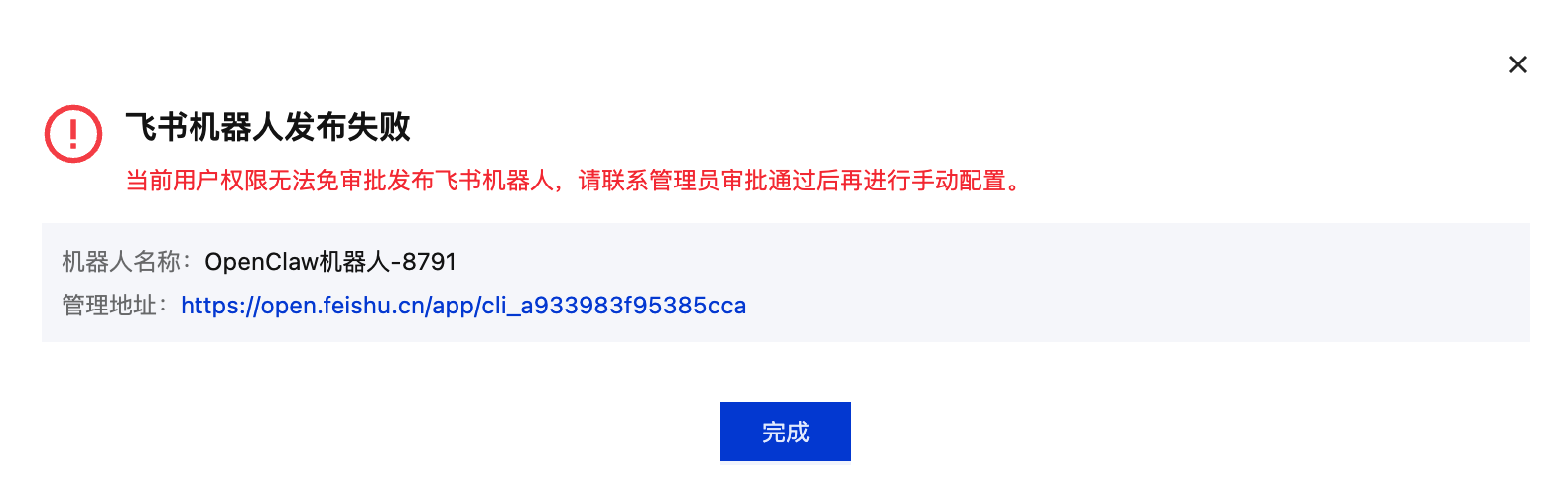
发布失败处理
当您没有发布飞书机器人的权限时,会显示“飞书机器人发布失败”
-当前用户权限无法免审批发布飞书机器人,请联系管理员审批通过后再进行手动配置。
解决办法
情况1:非管理员
联系管理员审核
情况2:管理员
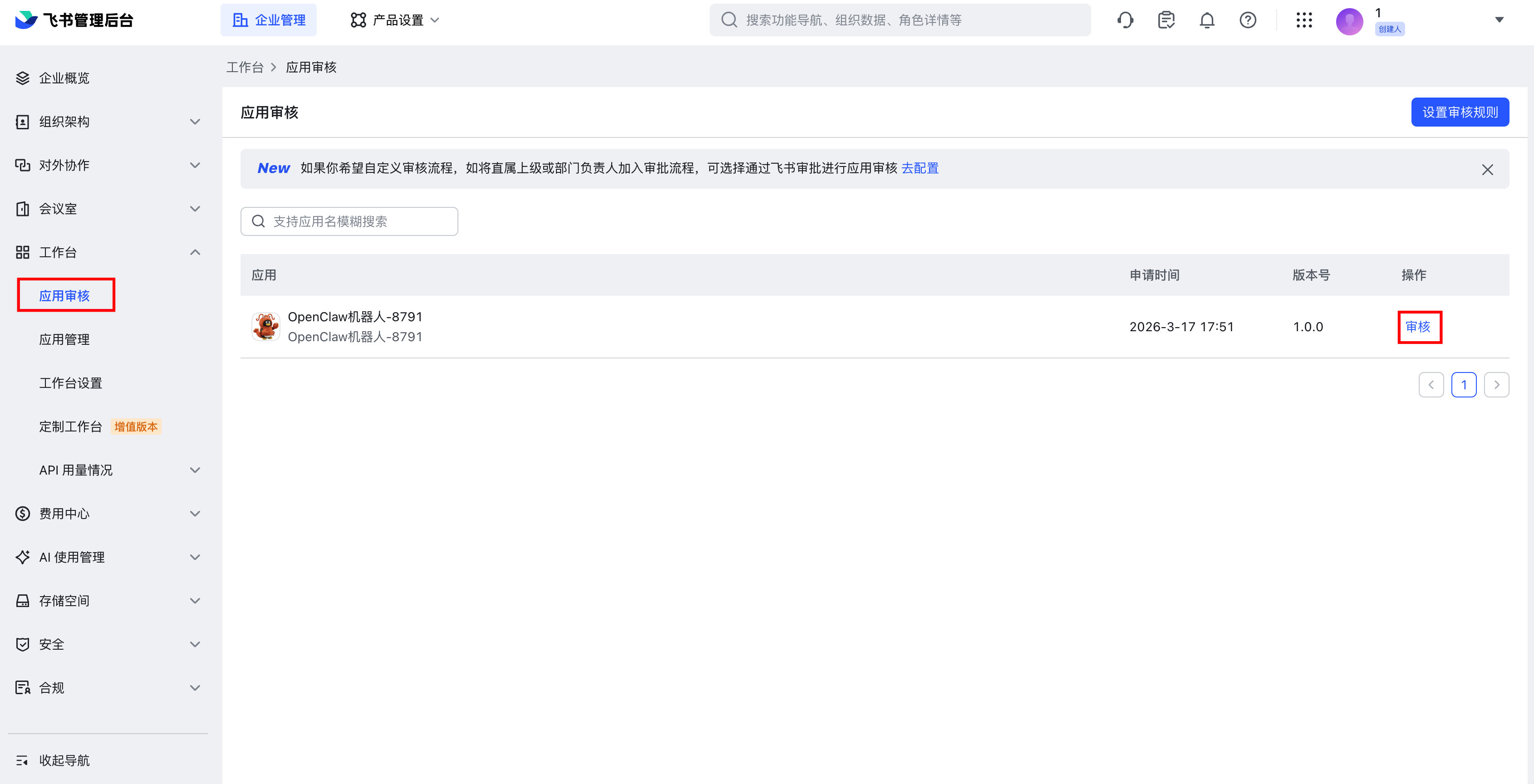
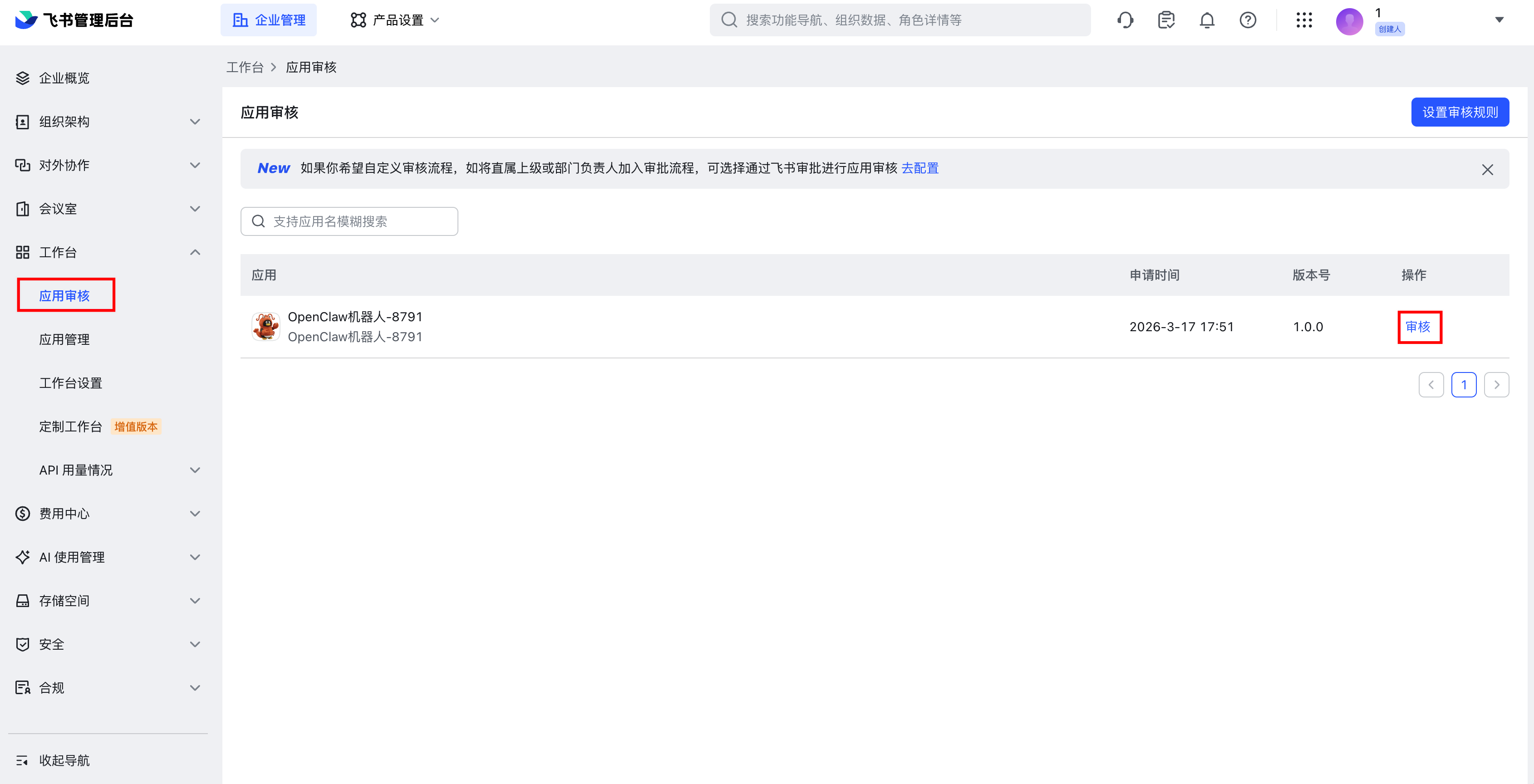
请进入 飞书企业管理后台;
点击 工作台-应用审核,在右侧应用列表点击“审核”,进行审核操作;
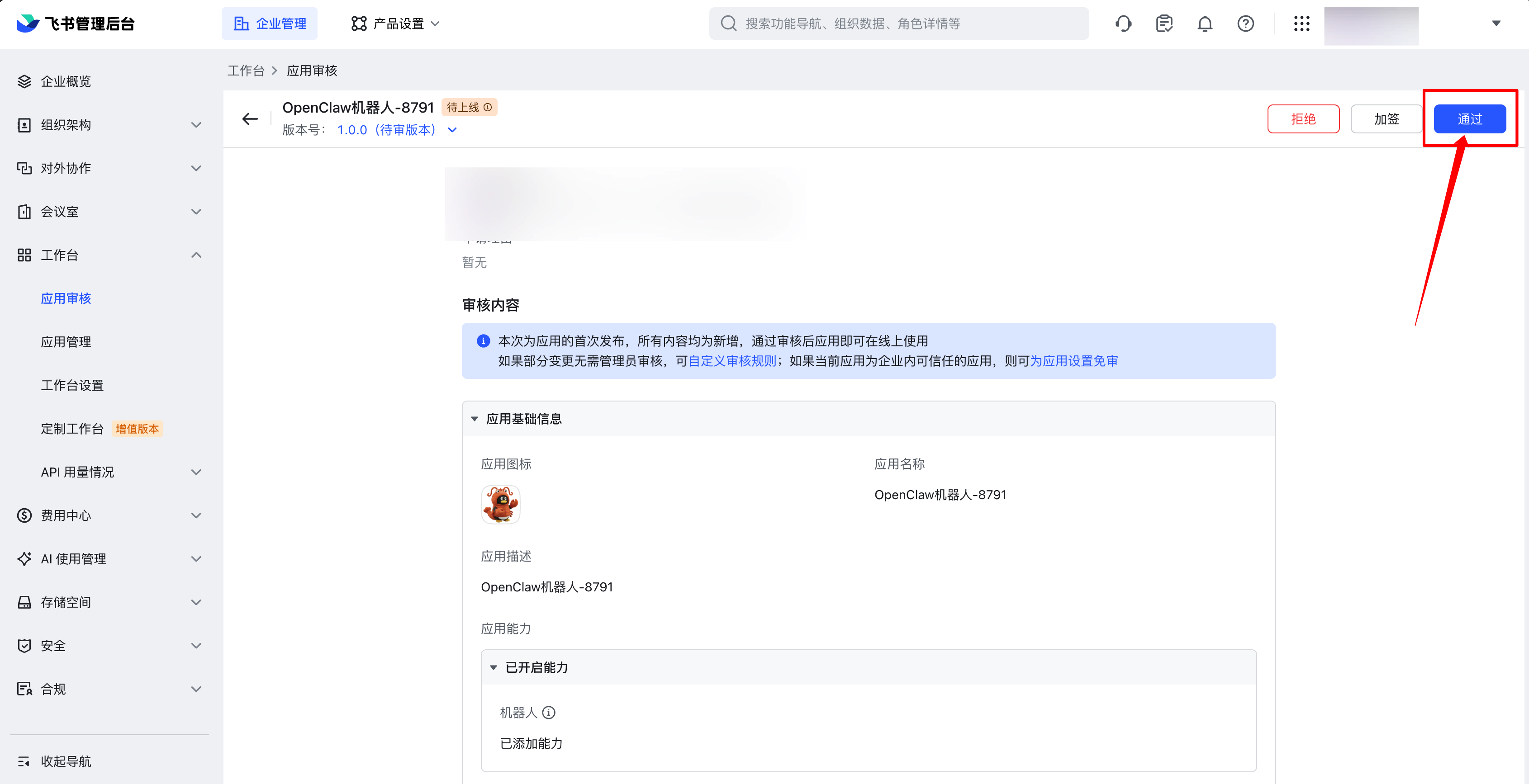
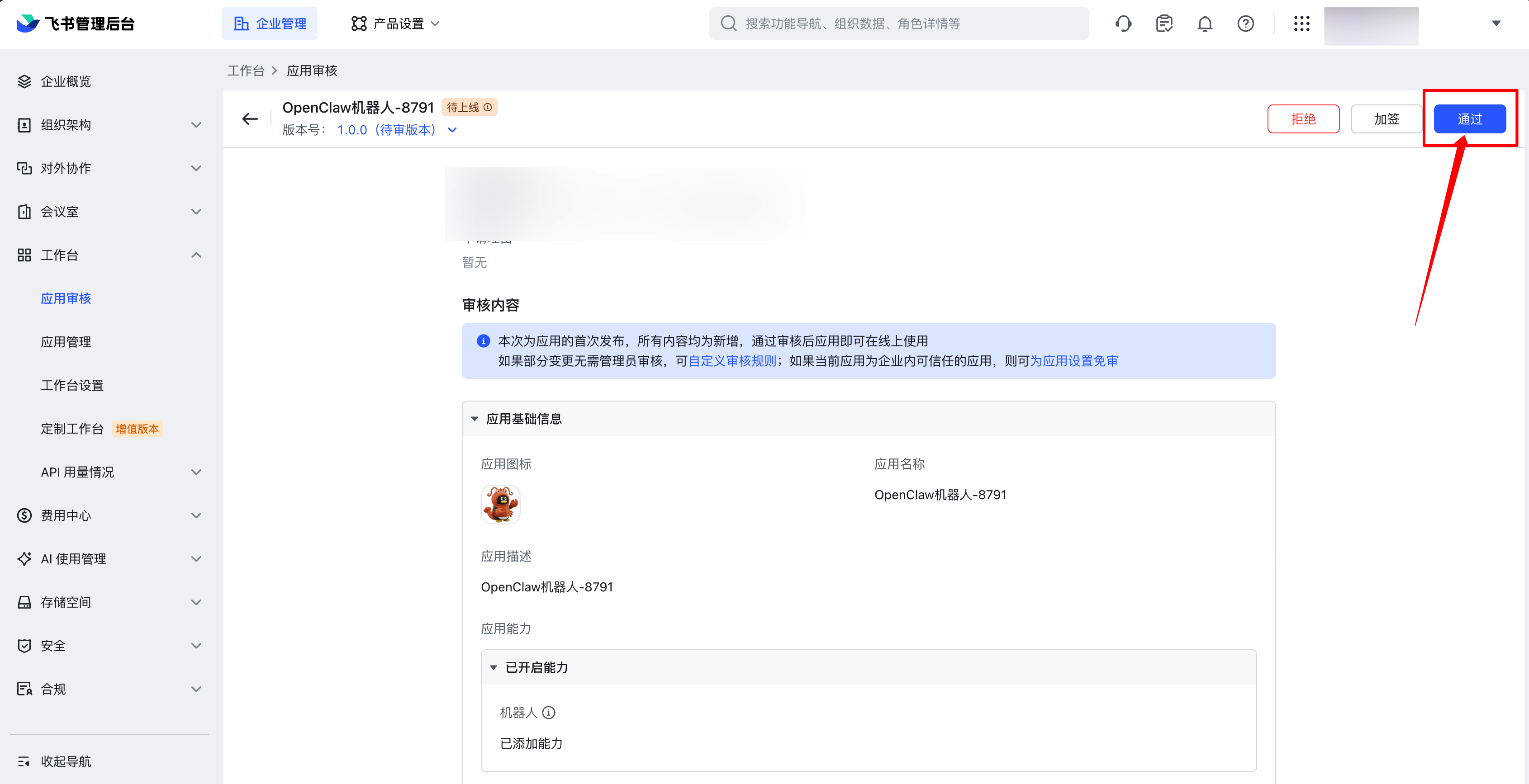
进入审批页面,点击右上角“通过”即可;
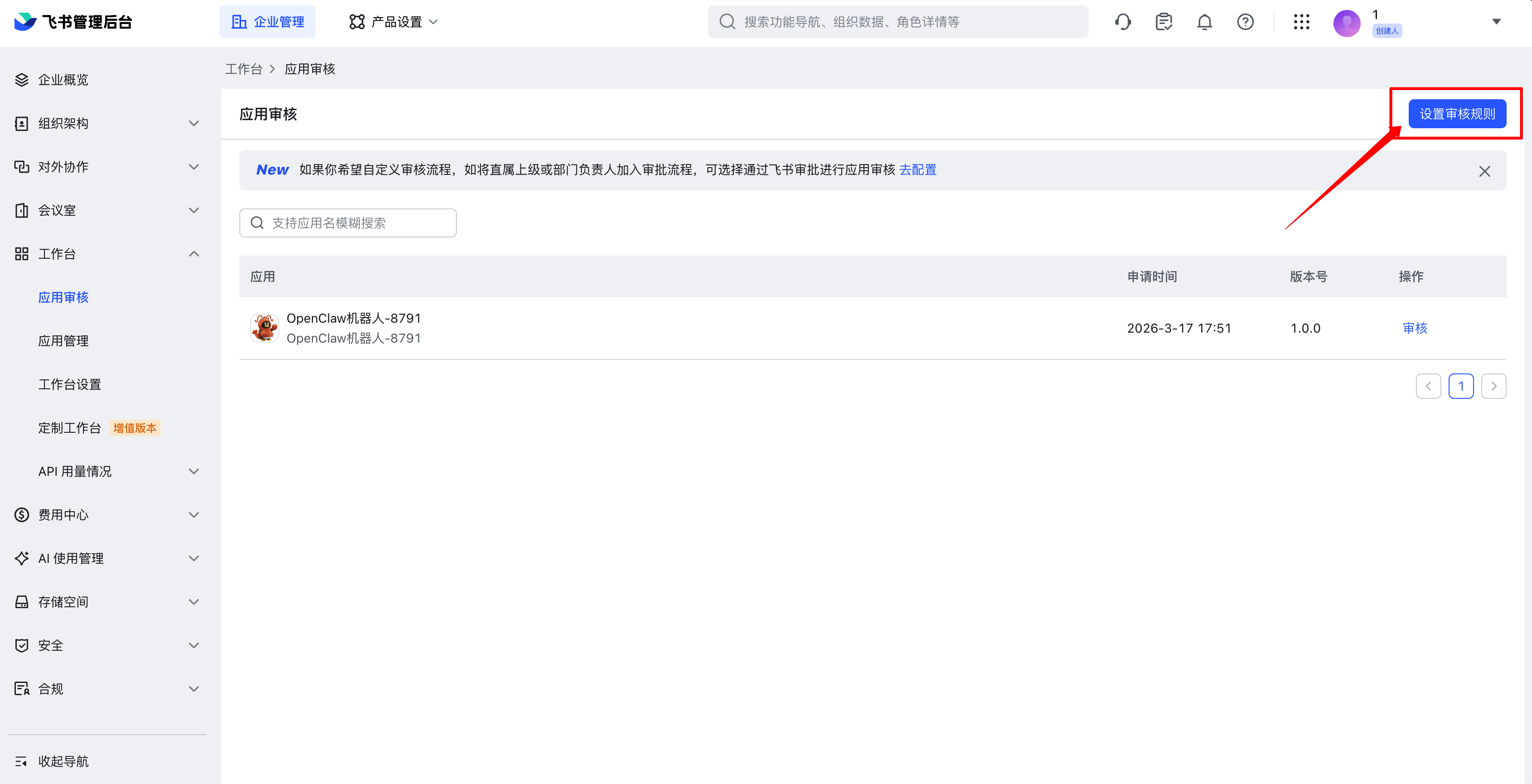
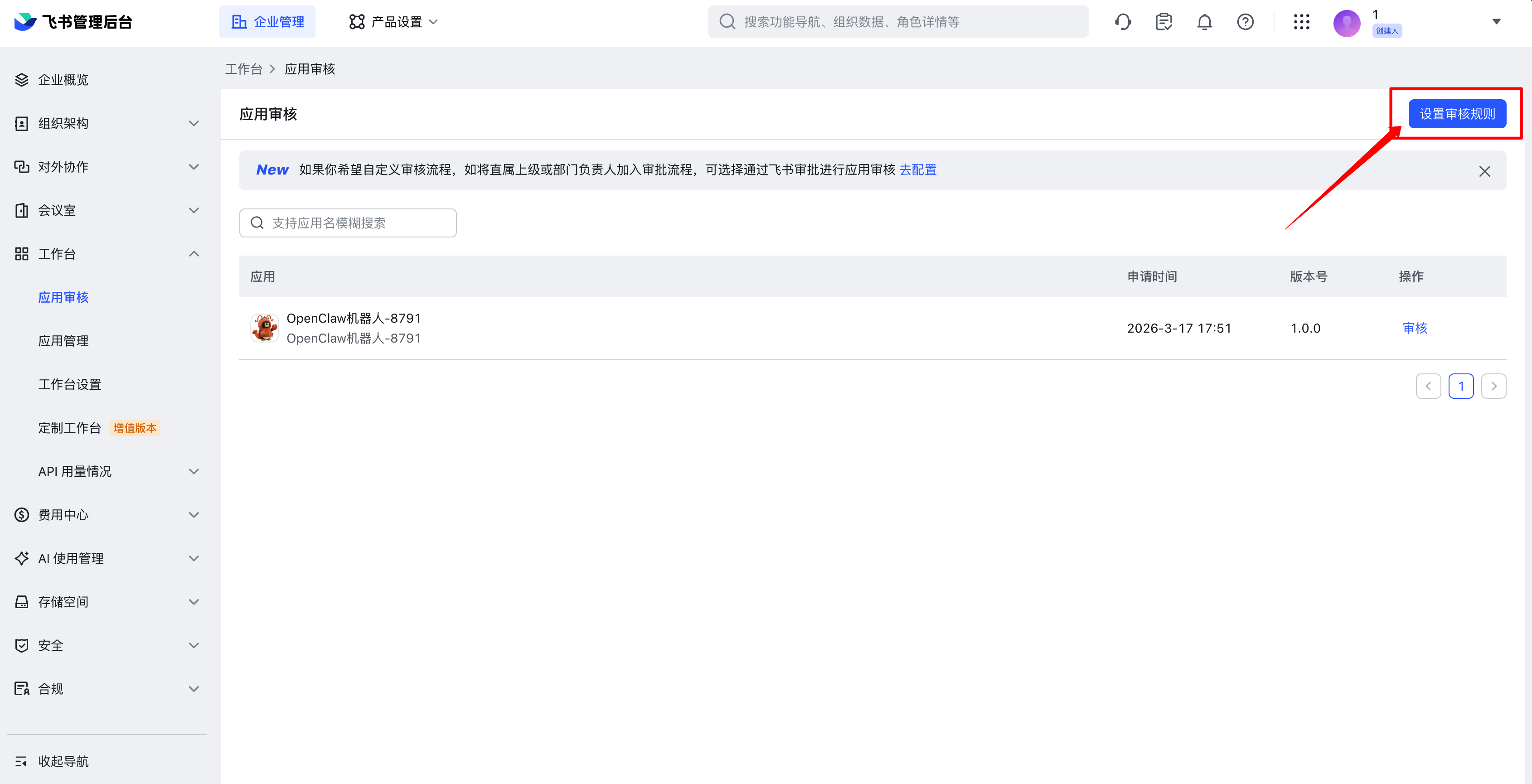
如果您想后续免审发布机器人,可点击“设置审核规则”;
进入审核规则页面,开启默认规则即可开启“全员免审”(蓝色为开启状态);

与机器人对话
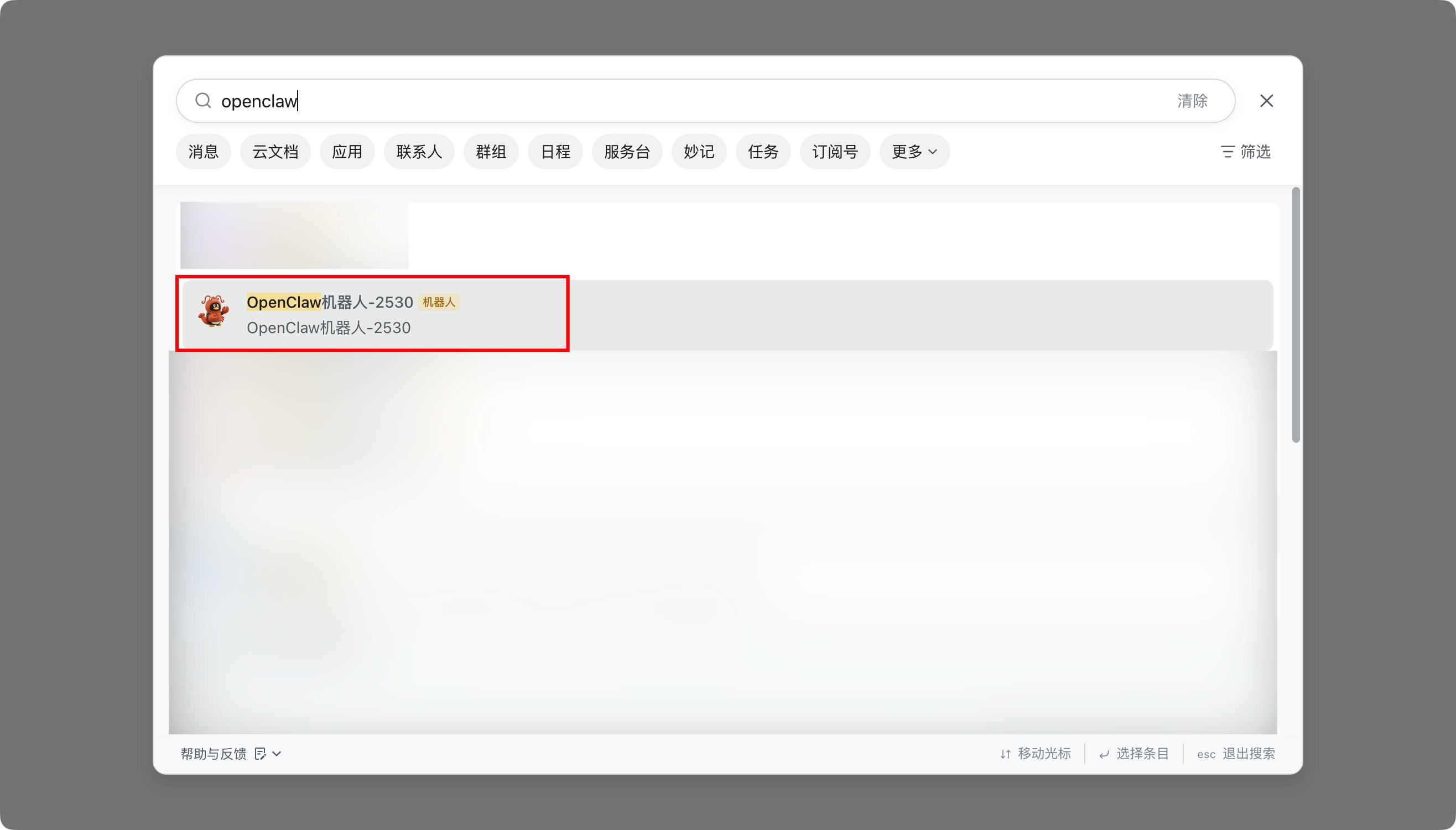
进入飞书应用的搜索栏,输入机器人名称,找到自动创建的机器人;点击该机器人,即可进行对话。
(更多与飞书机器人的交互教程请看下文章节-与飞书机器人进行交互)
接入方式二(手动配置)
创建飞书企业自建应用
创建飞书企业自建应用
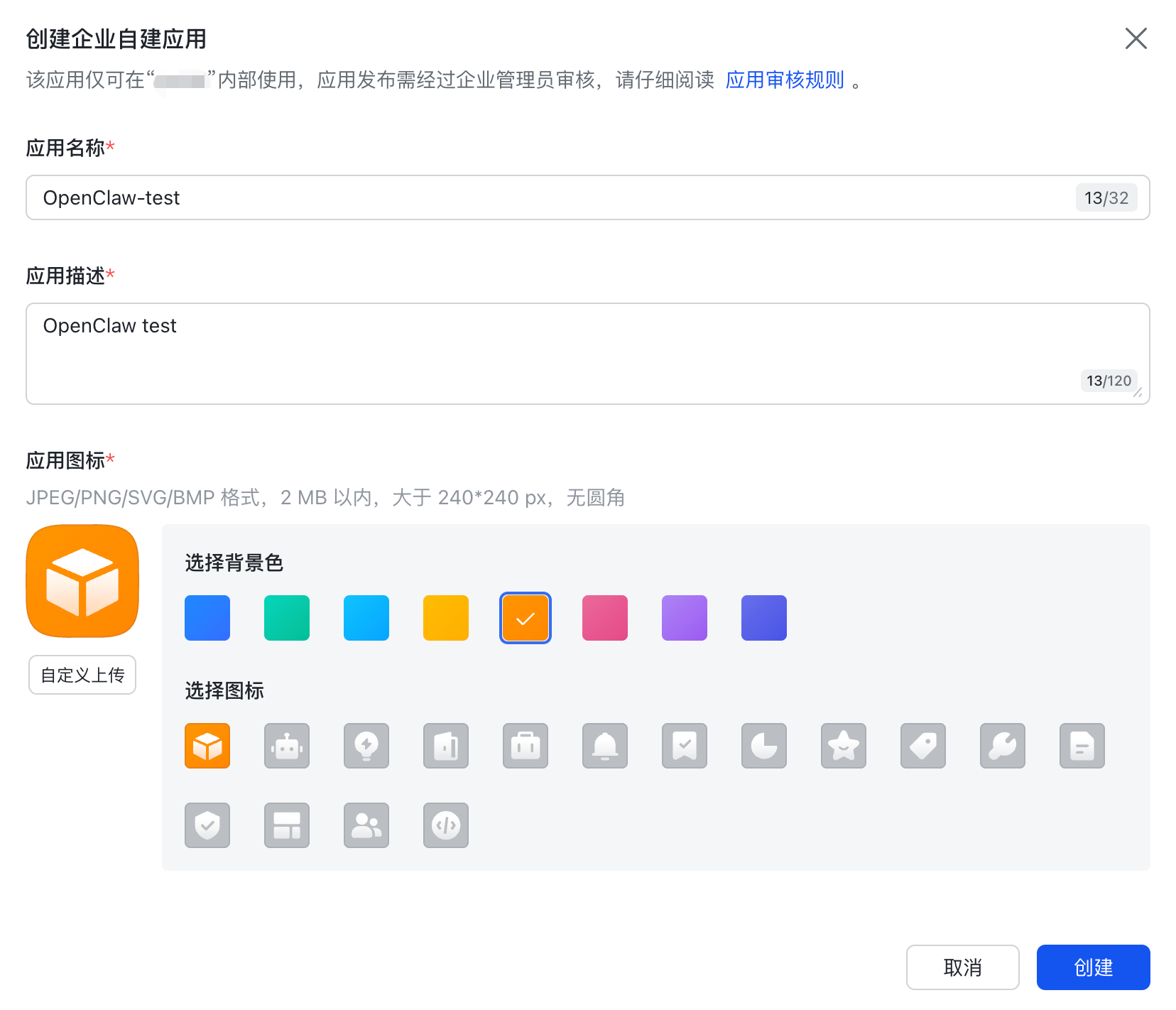
首先,您需要使用您的飞书账号登录飞书开放平台。登录成功后,点击创建企业自建应用。

填写应用名称(如 “OpenClaw助手”)、应用描述,选择应用图标,点击创建按钮,进入应用管理页面。
添加机器人
在前一步所创建应用的管理页面,左侧导航栏中找到并点击添加应用能力,在弹出的列表中选择机器人,点击添加。

提示:添加机器人之后,可以暂不发布,待其他配置完成后一并发布。
查询AppID和AppSecret
在左侧导航栏找到 “凭据与基础信息” ,点击进入。在页面中找到 “App ID” 和 “App Secret” 两个参数,分别点击右侧 “复制” 按钮,将其保存到个人记事本或备忘录中(注意数据安全,勿泄露),后续步骤中需要使用。

配置模型和通道
接下来需要为已经完成部署的OpenClaw配置模型和通道(即OpenClaw channel,如飞书)。
进入腾讯云控制台
进入腾讯云控制台,选中对应的已部署OpenClaw的Lighthouse服务器实例,点击服务器卡片进入“管理实例”页;
进入应用管理
进入腾讯轻量云Lighthouse应用管理页的配置面板;
模型配置
为OpenClaw配置模型API Key可以在轻量应用服务器Lighthouse产品控制台的应用管理页面进行操作。详情可参考教程“云上OpenClaw(原Clawdbot)一键秒级部署指南-配置模型API Key”,此处不再赘述。
【实用技巧】验证模型配置是否生效
如果您担心模型配置未生效,可以登录轻量应用服务器并通过OpenClaw TUI工具进行验证。具体步骤可以参考教程“云上OpenClaw(原Clawdbot)一键秒级部署指南-使用TUI与OpenClaw进行交互”。
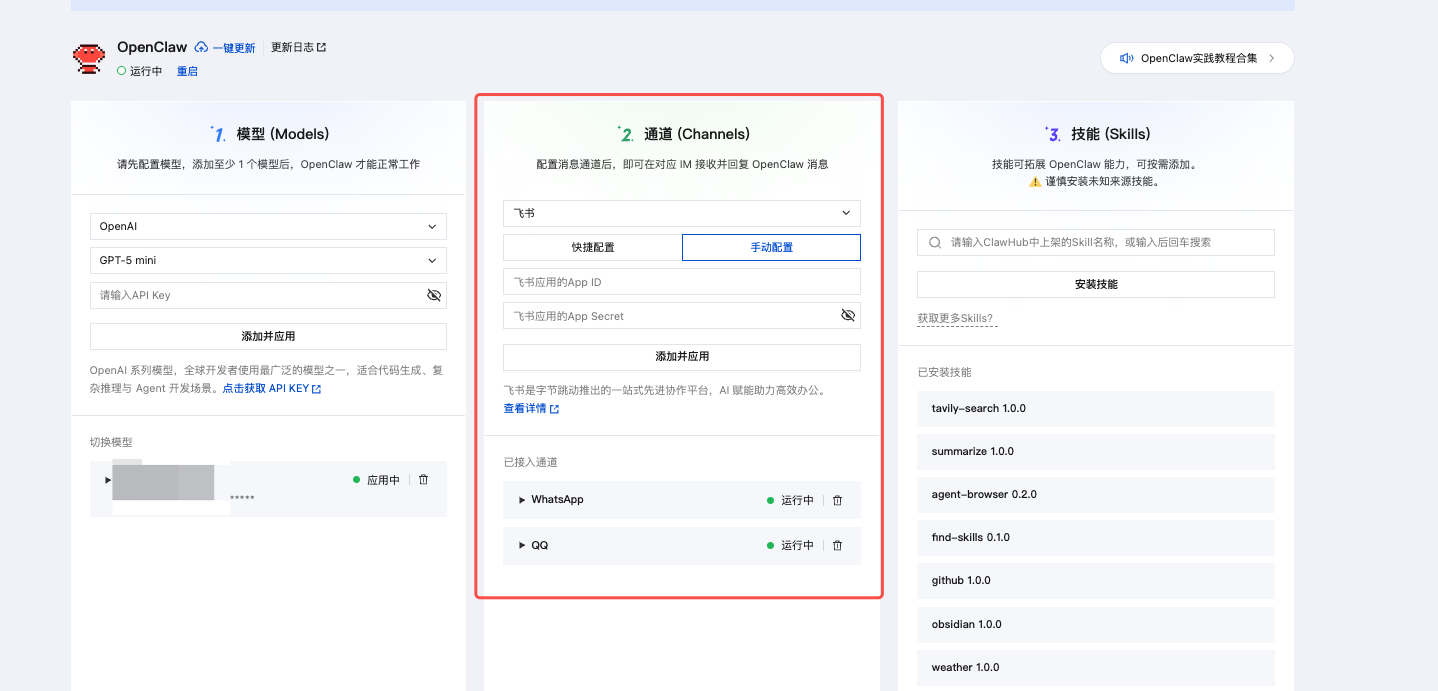
通道配置(配置飞书机器人App ID和App Secret)
进入“应用管理”页签,在“通道配置”输入框,选择“飞书”,输入前面步骤中查询到的飞书机器人的App ID和App Secret,并点击应用并确定执行操作,等待几十秒后页面提示“保存成功”即完成配置,确保你的飞书通道显示“使用中”。
提示:点击“应用”按钮完成通道配置之后,应用管理页面中仅展示“使用中”状态,并不会展示已配置的APP ID和App Secret。
飞书机器人相关配置
事件配置
在飞书应用管理页,左侧导航栏找到 “事件与回调” ,点击进入页面。在“事件配置”页签中选择 “长连接接收事件”,点击保存。

⚠️注意:如果这一步报错提示“应用未建立长连接”,请检查前面步骤中的机器人App ID和App Secret是否已正确配置。
此时如果事件配置保存成功,可直接前往后续的“添加事件”步骤。
(可选)如果检查前面步骤中的机器人App ID和App Secret均已经正确配置,但点击保存后仍然报错“应用未建立长连接”,可以参考以下步骤来建立长连接:在轻量应用服务器应用管理页面,找到OpenClaw状态显示,点击“重启”按钮,重启网关服务,再返回飞书开放平台,点击保存事件配置,完成建立长连接。

### 添加事件
点击“事件配置”页面中的 “添加事件”,在弹出的列表中,搜索并添加 “接收消息”,点击 “确认添加”,按照指引确认开通权限。

(推荐)若您期望将飞书机器人添加进聊天群组中使用,可以参考前述步骤继续添加更多群组相关权限,主要包括“消息已读”、“机器人进群”、“机器人被移出群”。否则,请跳过本步骤。

完成添加后,可以在当前页面的列表中查看到已添加的事件。

回调配置
在“事件与回调-回调配置”页面中,订阅方式选择 “使用长连接接收回调”,点击保存,无需填写其他地址,配置自动生效。

权限配置
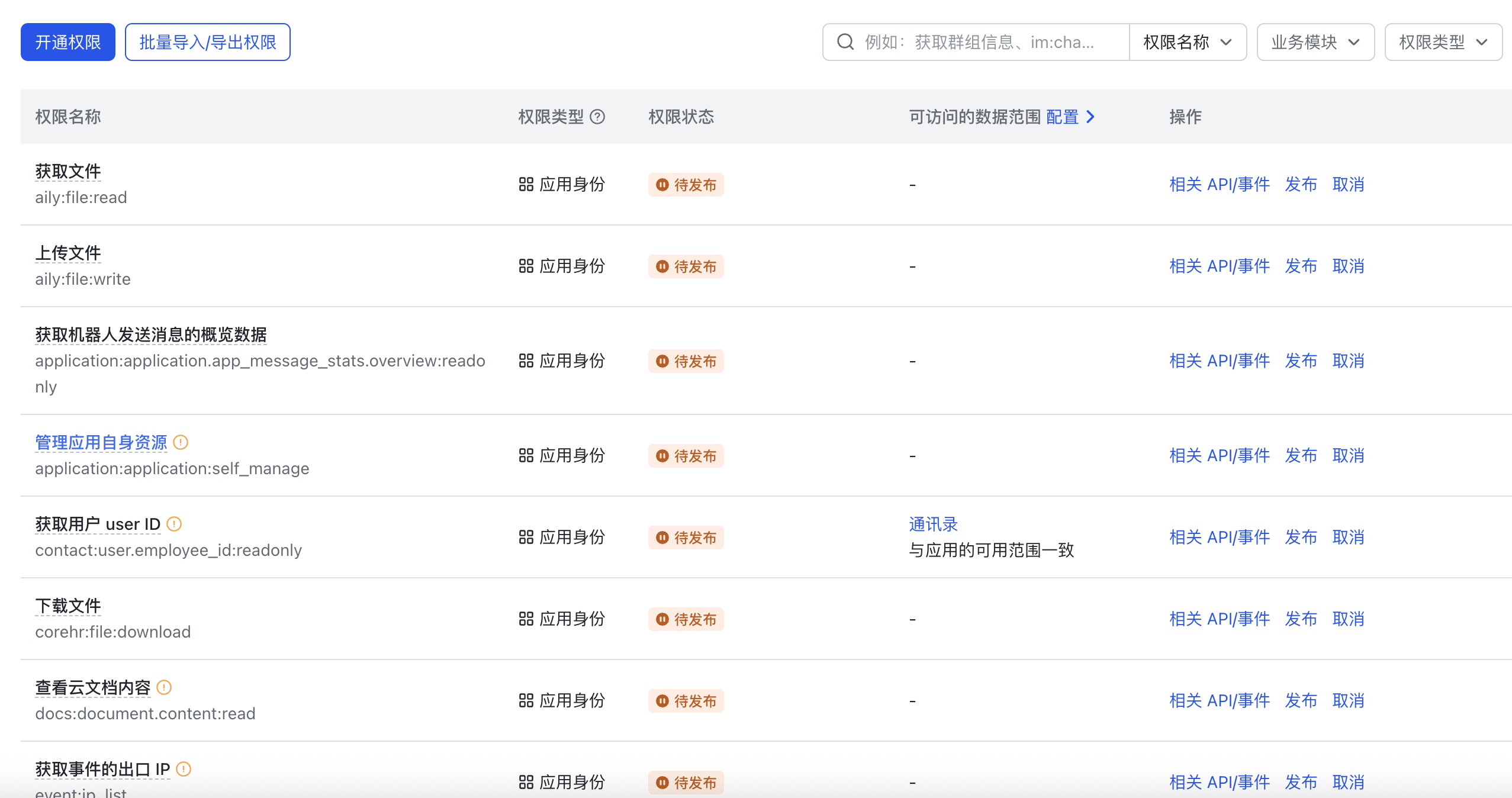
在飞书应用管理页,左侧导航栏找到 “权限管理” ,点击进入页面。点击页面中的 “批量导入权限” 按钮,弹出权限导入窗口。


复制以下代码,替换前面弹窗中原有的JSON内容,点击下一步,确认新增权限,继续申请开通,确认后等待权限导入完成。
{
"scopes": {
"tenant": [
"im:message",
"im:message.p2p_msg:readonly",
"im:message.group_at_msg:readonly",
"im:message:send_as_bot",
"im:resource",
"contact:user.base:readonly",
"im:message.group_msg",
"im:message:readonly",
"im:message:update",
"im:message:recall",
"im:message.reactions:read",
"docx:document:readonly",
"drive:drive:readonly",
"wiki:wiki:readonly",
"bitable:app:readonly",
"task:task:read",
"contact:contact.base:readonly",
"docx:document",
"docx:document.block:convert",
"drive:drive",
"wiki:wiki",
"bitable:app",
"task:task:write"
],
"user": []
}
}
权限导入完成后,可以在权限列表中查看已成功导入的权限。
提示:后续使用飞书机器人过程中也可以按需调整权限设置。

创建版本并发布
在飞书应用管理页,左侧导航栏找到 “版本管理与发布” ,点击进入页面。点击右上角的创建版本。

填写应用版本号(此处以1.0.0为例,您可以自行定义版本号)和更新说明,点击保存并确认发布。

待飞书管理员通过发布审核。审核发布成功后,可以在“版本管理与发布”页面,查看到已经发布的版本号和状态。
如果创建版本后,提示:企业管理员正在审核应用发布申请。请查看下方解决办法
情况1:您不是管理员
请在飞书内部联系您所属组织/公司的管理员进行审核;
情况2:您是管理员
请进入 飞书企业管理后台;
点击 工作台-应用审核,在右侧应用列表点击“审核”,进行审核操作;
进入审批页面,点击右上角“通过”即可;
如果您想后续免审发布机器人,可点击“设置审核规则”;
进入审核规则页面,开启默认规则即可开启“全员免审”(蓝色为开启状态);

与飞书机器人进行交互
完成前面的步骤之后,您可以与飞书机器人进行单独聊天,或者将飞书机器人添加进群聊。
单独聊天
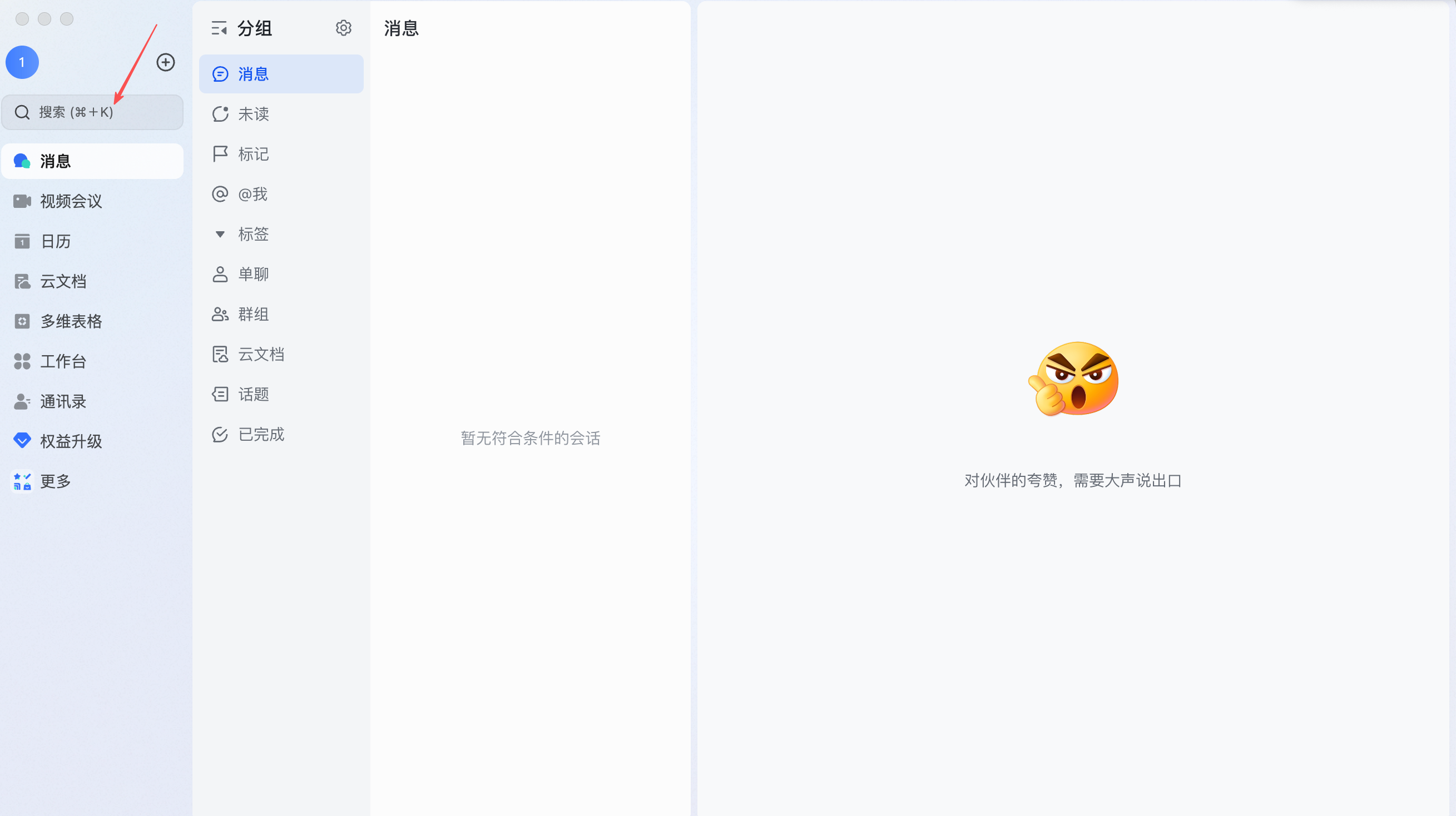
以电脑版飞书软件为例(手机端飞书的操作类似),登录飞书后,点击搜索框。
在搜索框中输入前面步骤中创建并发布的飞书机器人的应用名称,输入回车进行搜索。

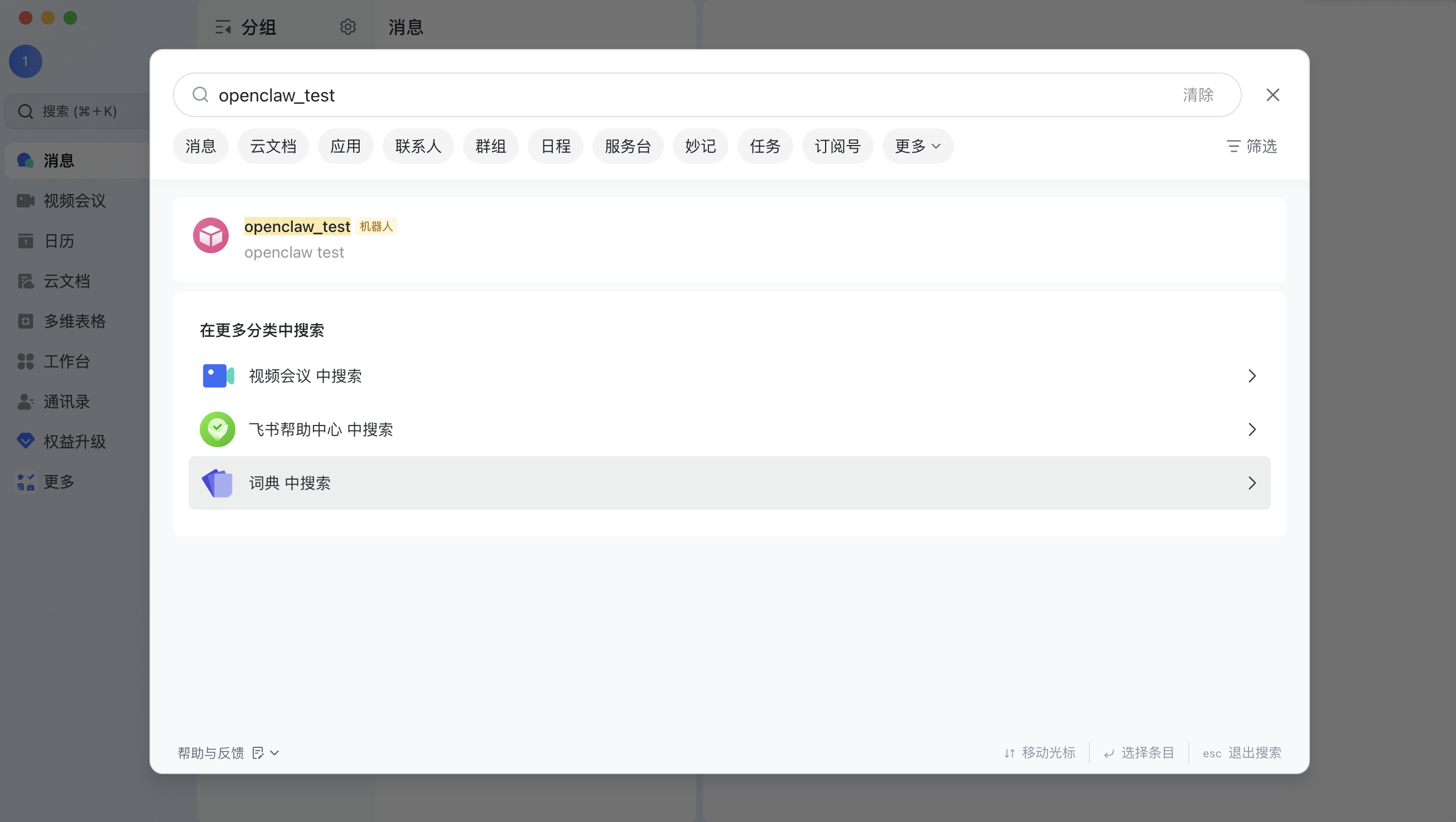
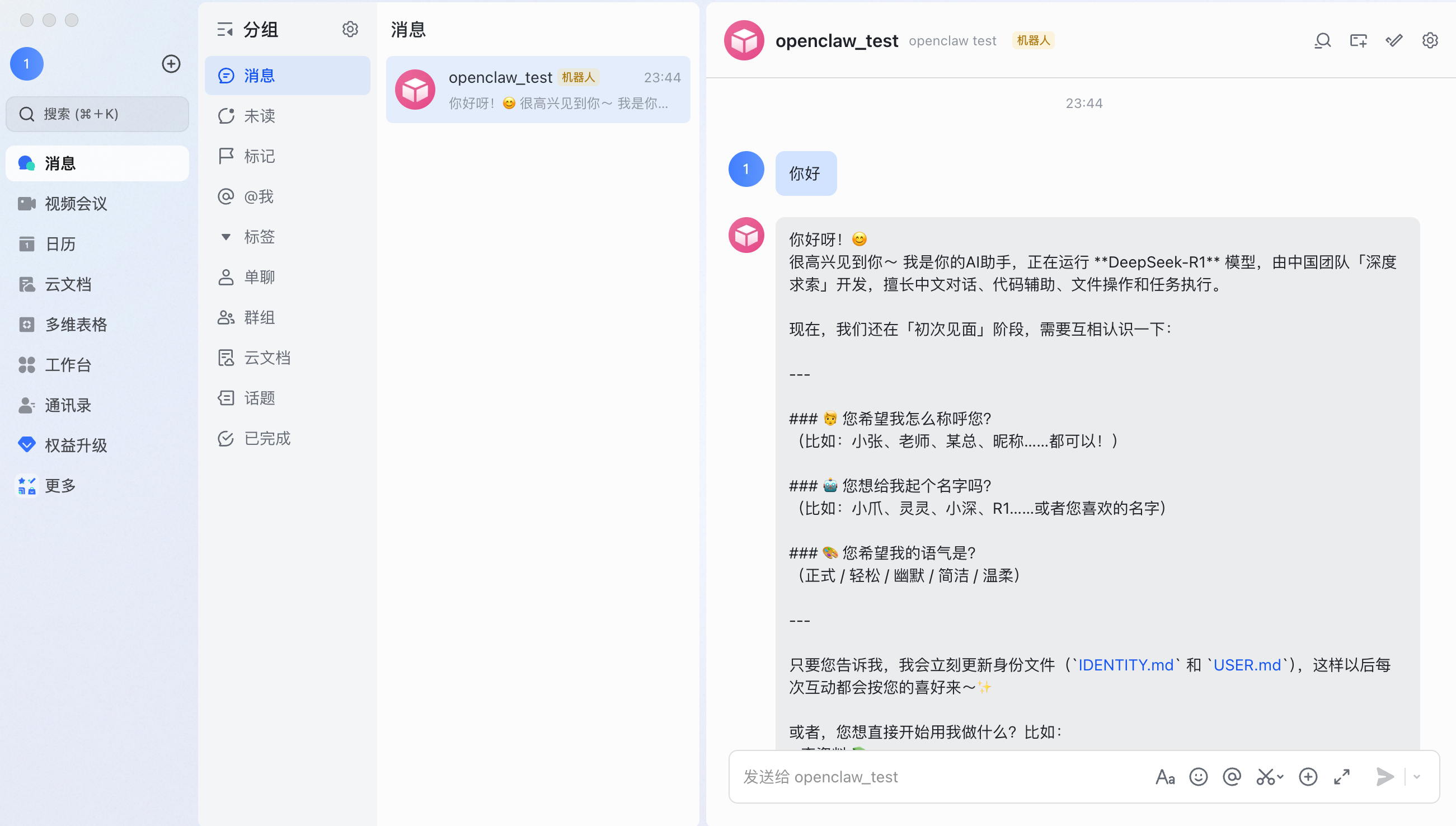
单击搜索到的机器人,进入私聊页面,即可开始与已经接入OpenClaw的飞书机器人进行对话。
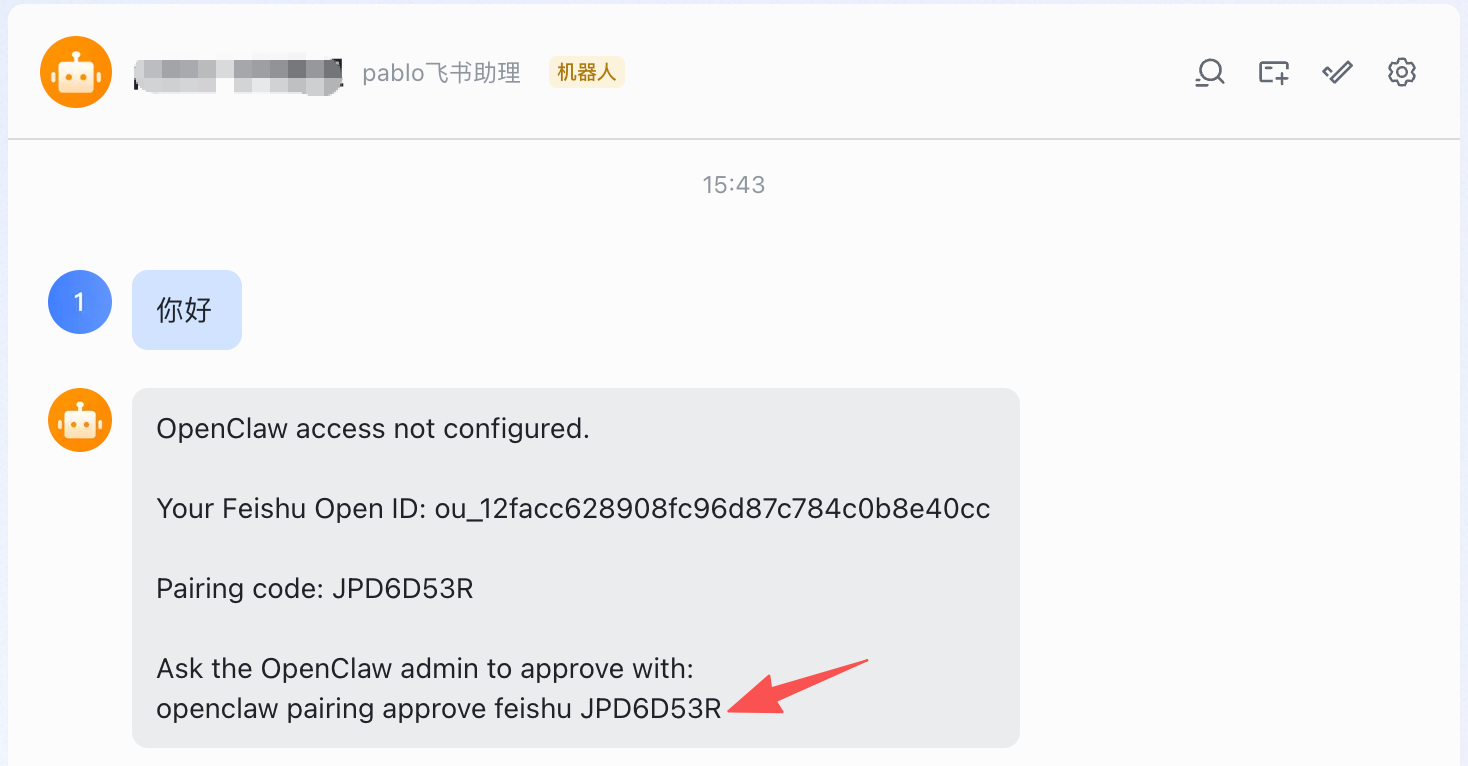
(如对话时未出现可直接跳过本步骤)首次对话会如果提示如下图所示的配对(Paring)请求,可以复制机器人回复的最后一行命令行。
接下来返回轻量应用服务器控制台,选中前面步骤中完成OpenClaw配置的服务器,点击登录,使用OrcaTerm终端免密登录服务器。在终端中粘贴上一步中复制的命令行,点击回车执行命令。命令完成执行后会提示配对成功。
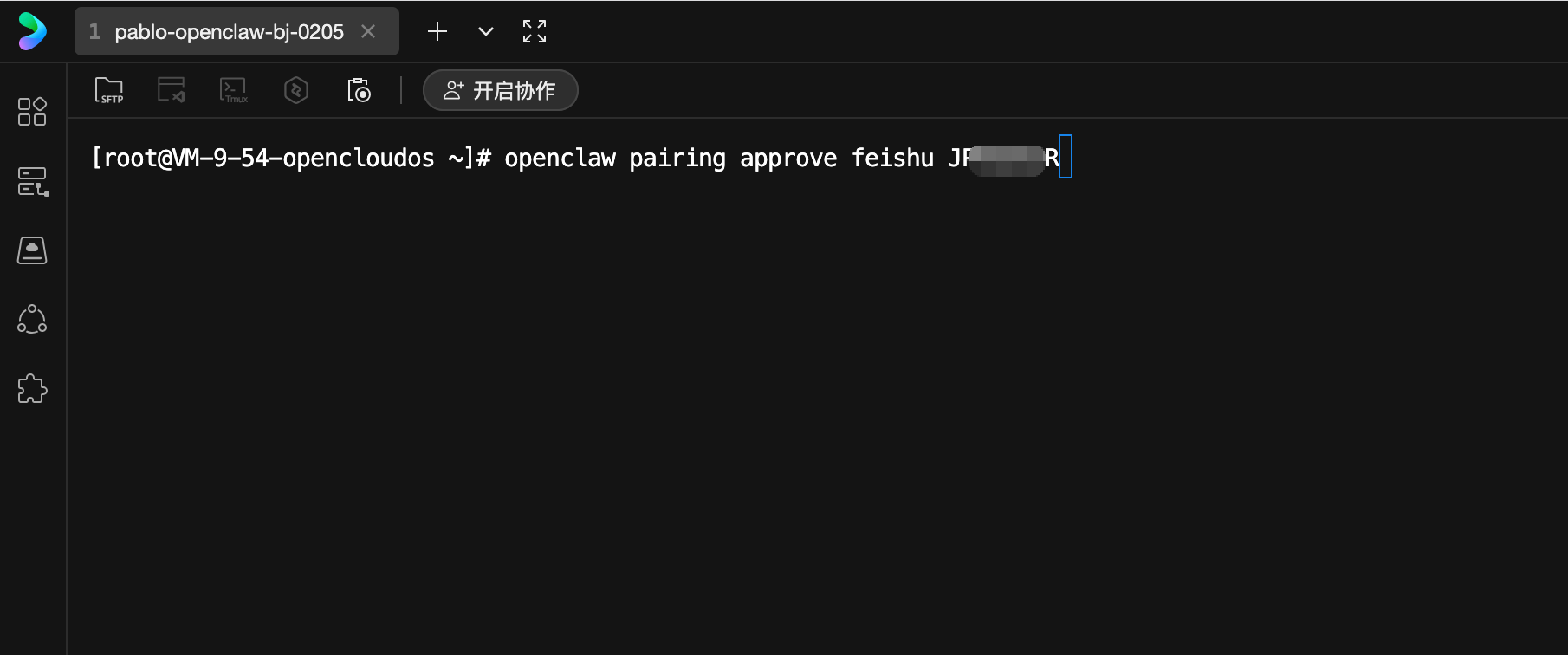
接下来继续尝试与该机器人进行对话,如果机器人以AI的方式进行回复,即说明配对成功。
群聊添加飞书机器人
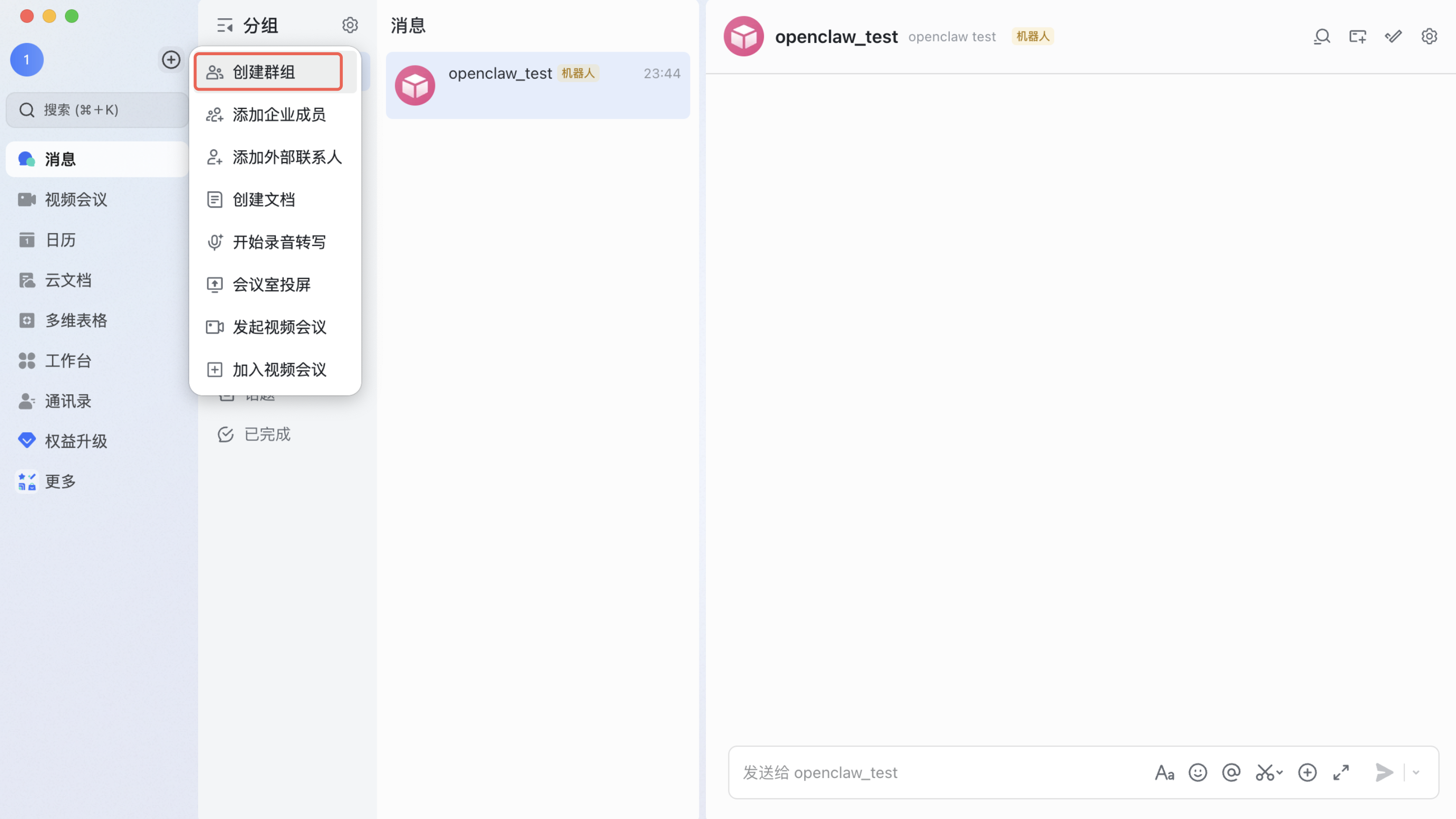
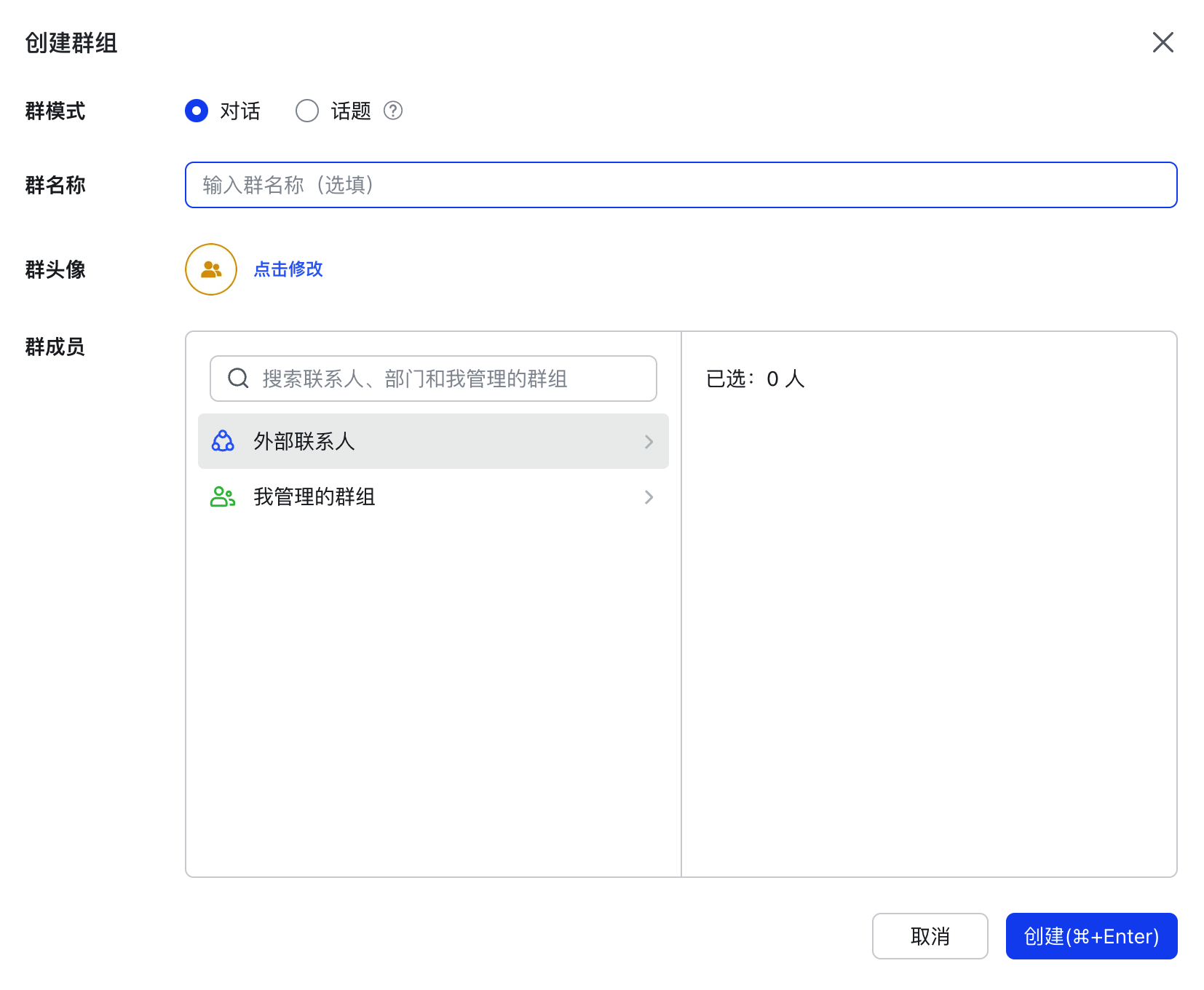
对于群组聊天的场景,可以点击飞书搜索框上方的加号,选择创建群组,并完成创建。
进入新创建的群组,点击右上角的设置。

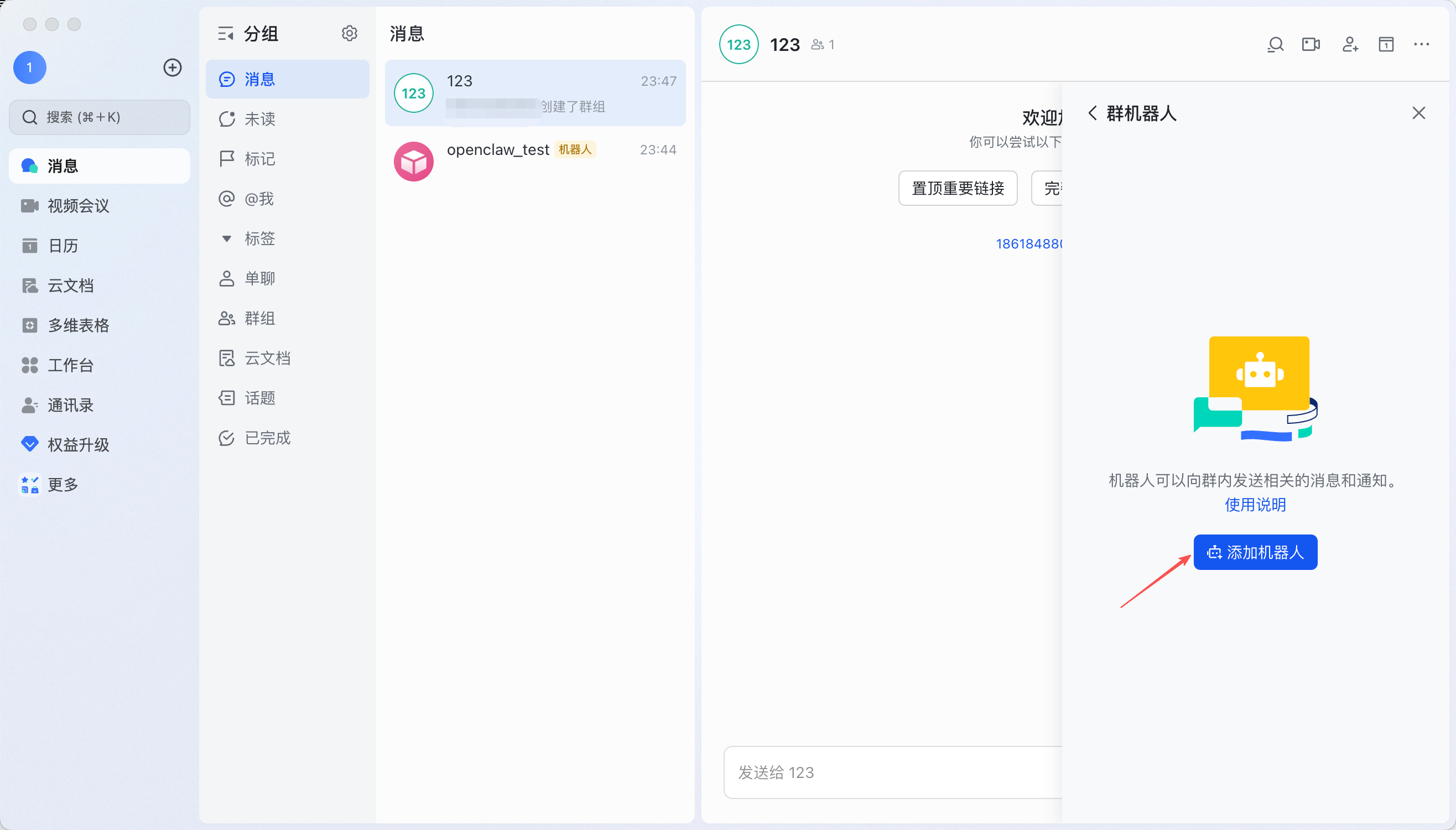
在上方搜索框搜索您创建的机器人的应用名称。
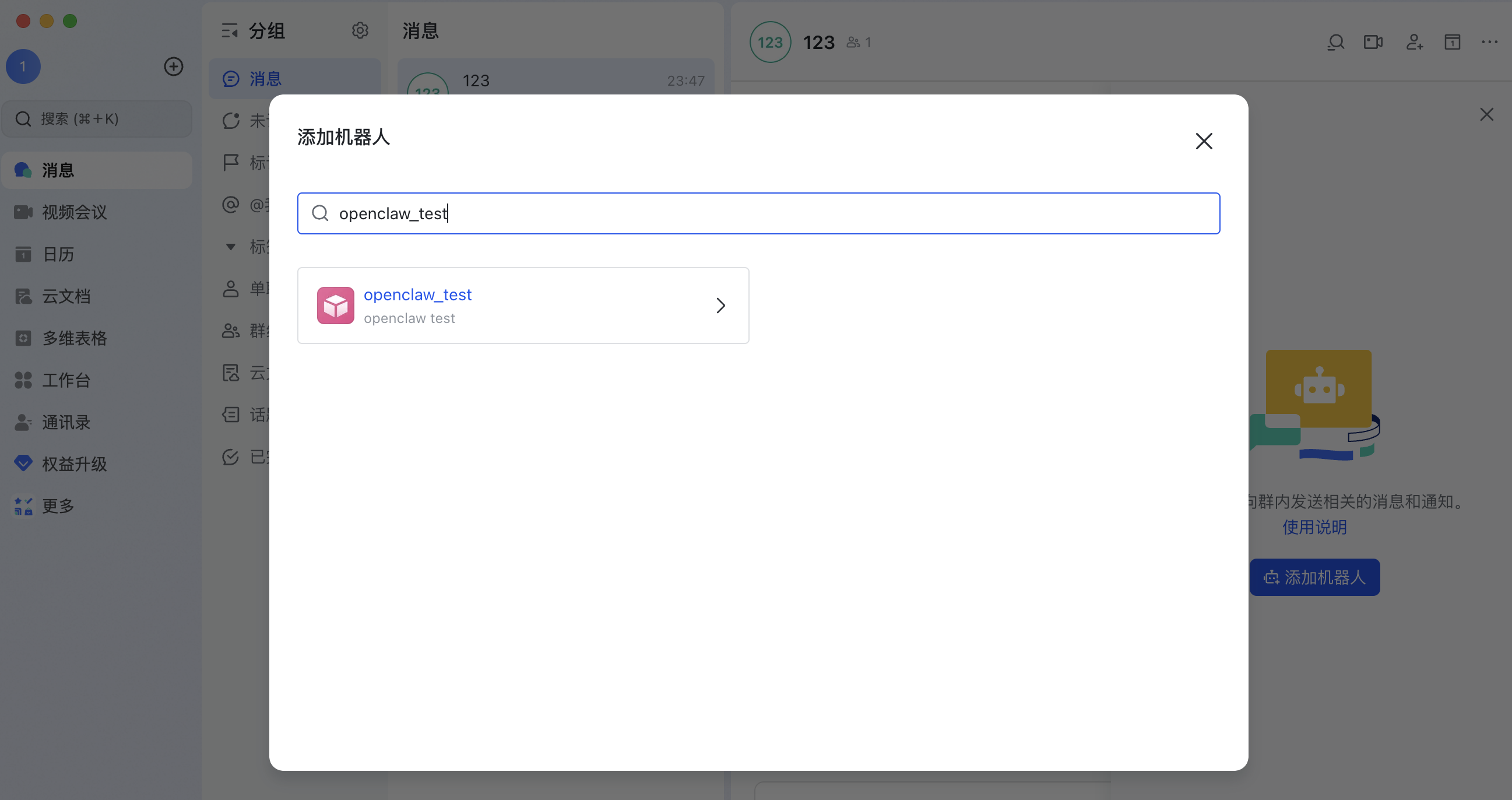
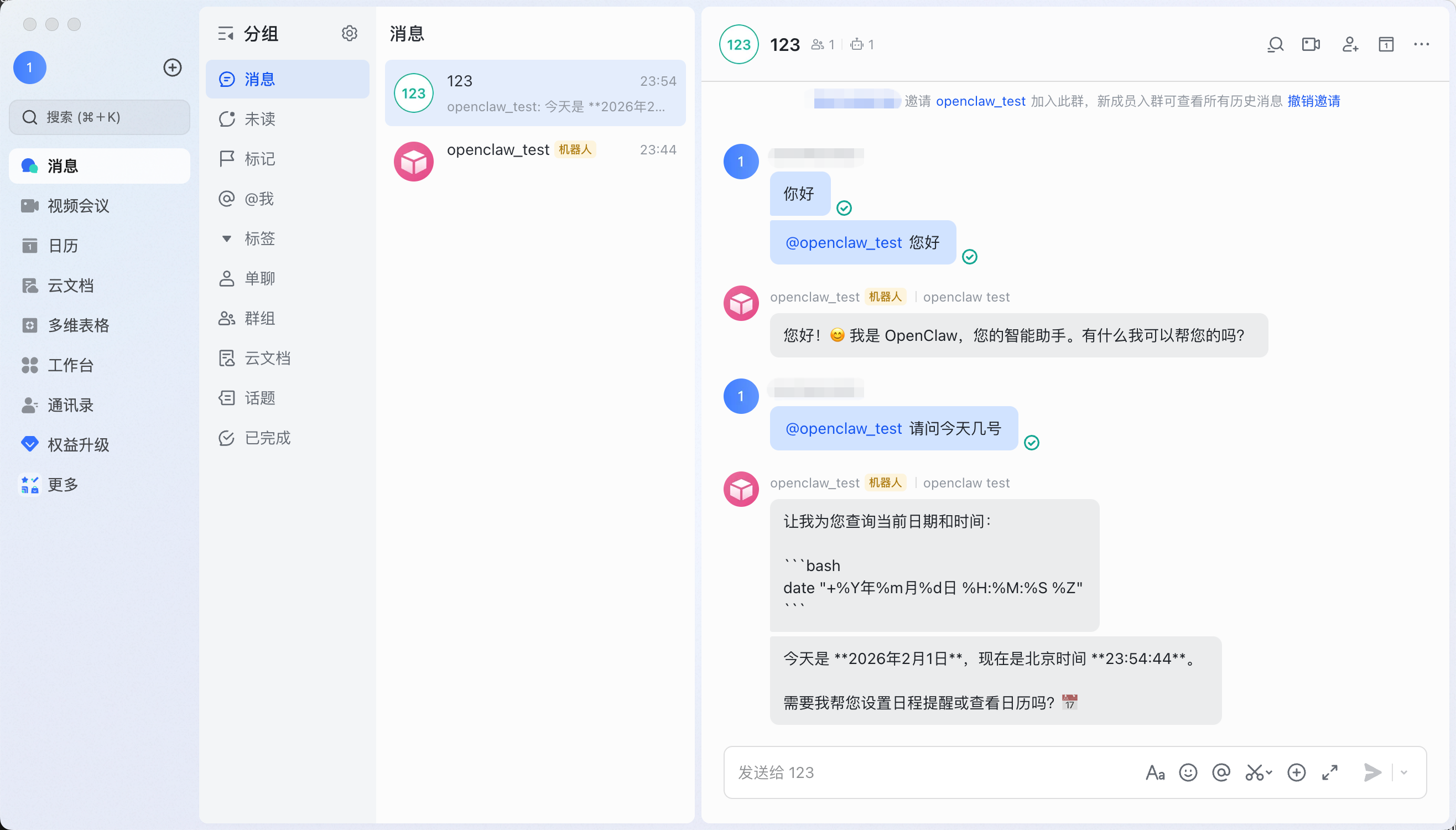
选择您之前创建的机器人后,点击添加即可将飞书机器人加入群聊,示例如下所示。

到这里就初步完成了配置,在手机版飞书和电脑版飞书上均可以开始与已经接入OpenClaw的飞书机器人进行聊天。
注意:机器人只能被添加进同一企业下的群聊,外部群无法添加机器人。
支持的消息类型
基于前述步骤将OpenClaw接入飞书后,飞书机器人除了能够进行接收、回复基础的文本信息外,还支持更多消息类型,详情如下表所示:
| 飞书机器人支持的消息类型和功能 | 是否支持 |
|---|---|
| 接收文本信息 | ✅ 已支持 |
| 接收图片 | ✅ 已支持 |
| 接收文件 | ✅ 已支持 |
| 接收音频、视频 | ✅ 已支持 |
| 回复文本信息 | ✅ 已支持 |
| 回复图片 | ✅ 已支持 |
| 回复文件 | ✅ 已支持 |
| 回复音频 | ✅ 已支持 |
| 回复内容支持 Markdown 格式 | ✅ 已支持 |
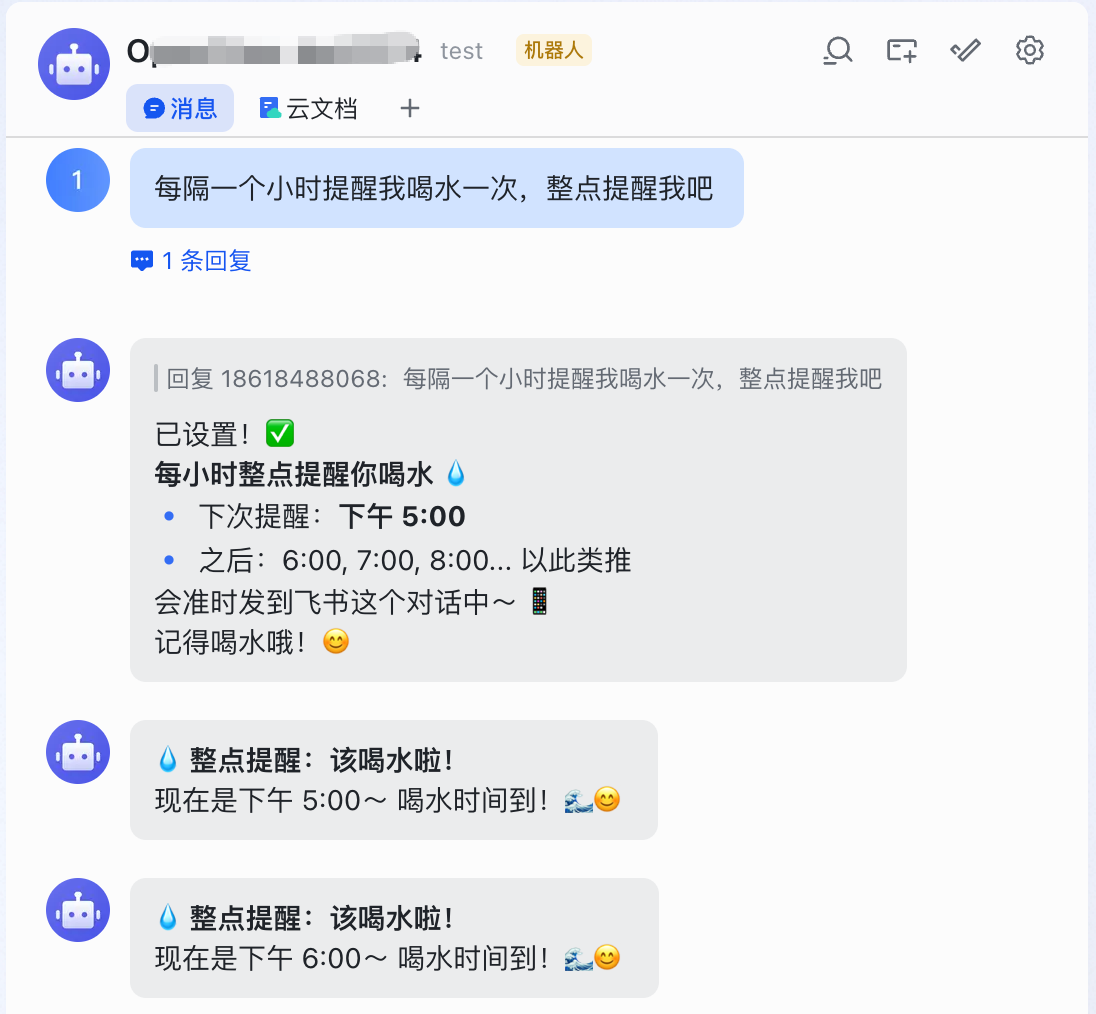
| 主动发送消息(如定时发送提醒) | ✅ 已支持 |
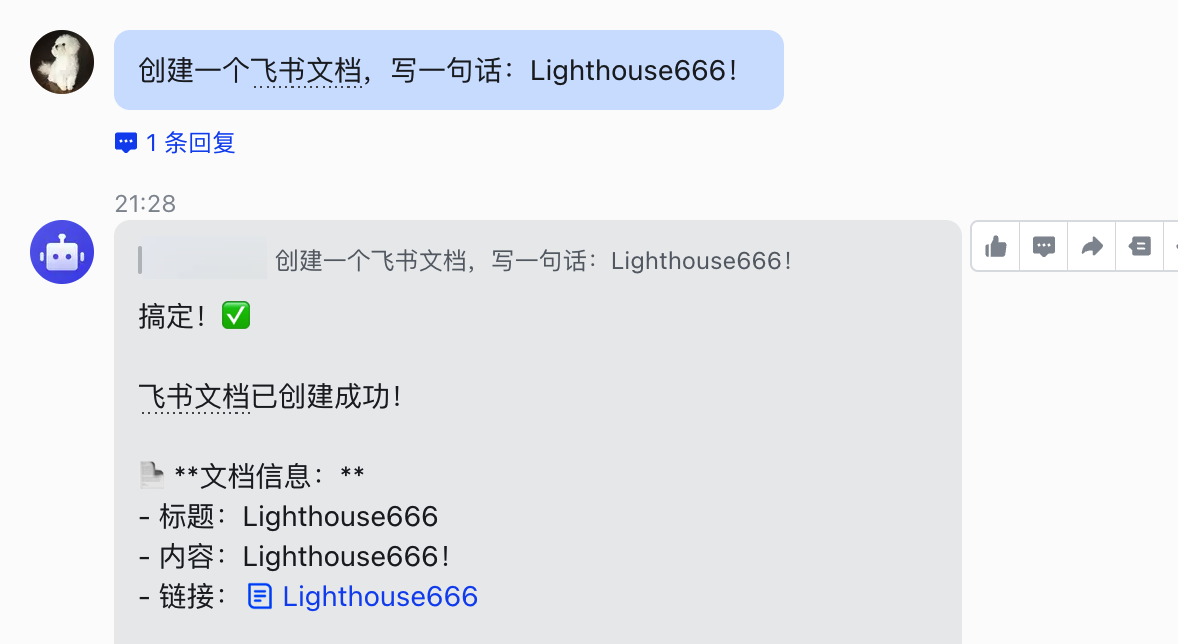
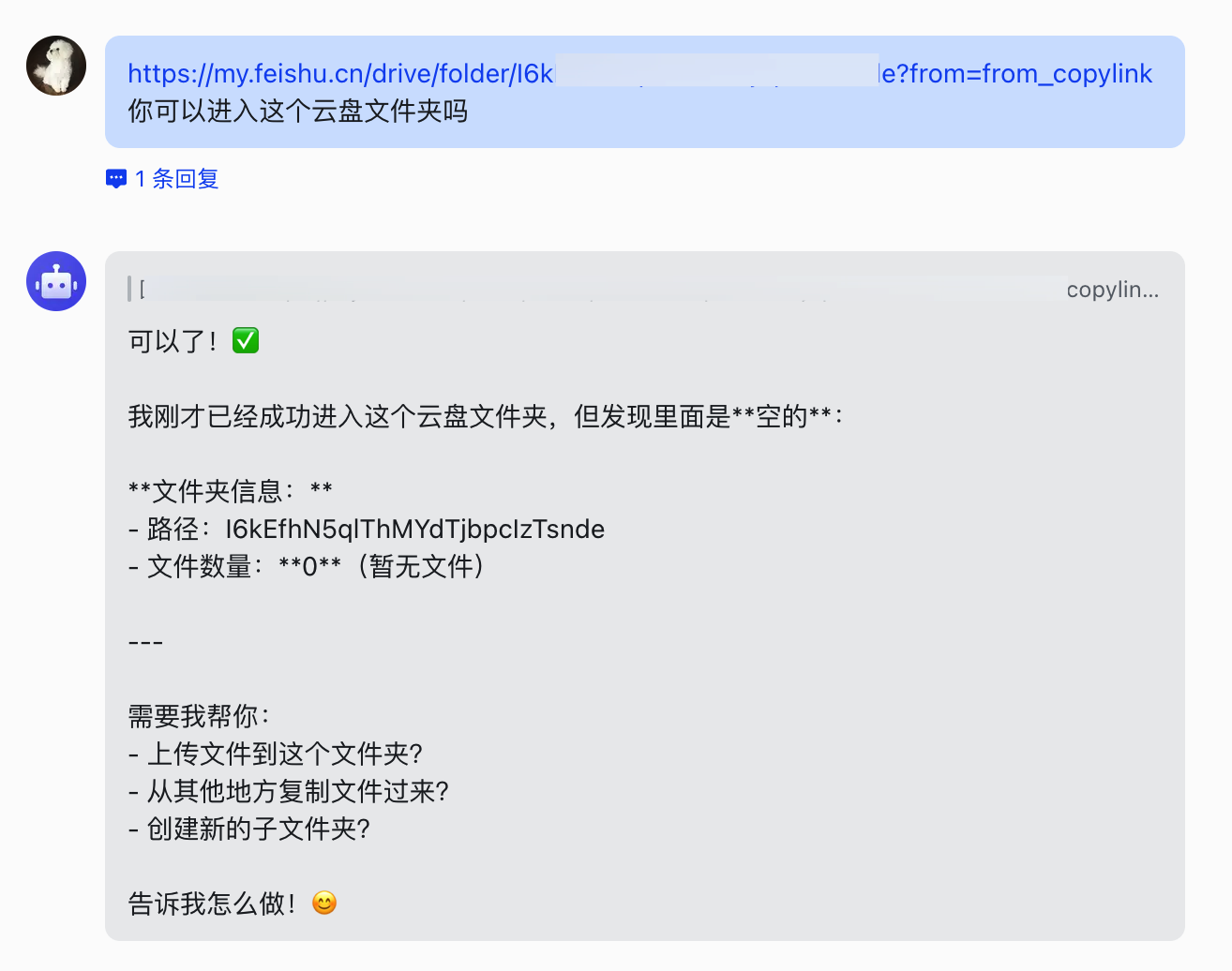
| 操作飞书文档、Wiki知识库、飞书云盘 | ✅ 已支持 |
提示:上述表格仅代表飞书机器人支持接收、回复的消息类型,实际能否完成处理图片、文件等任务,还取决于OpenClaw接入的模型是否具备相应的处理能力。
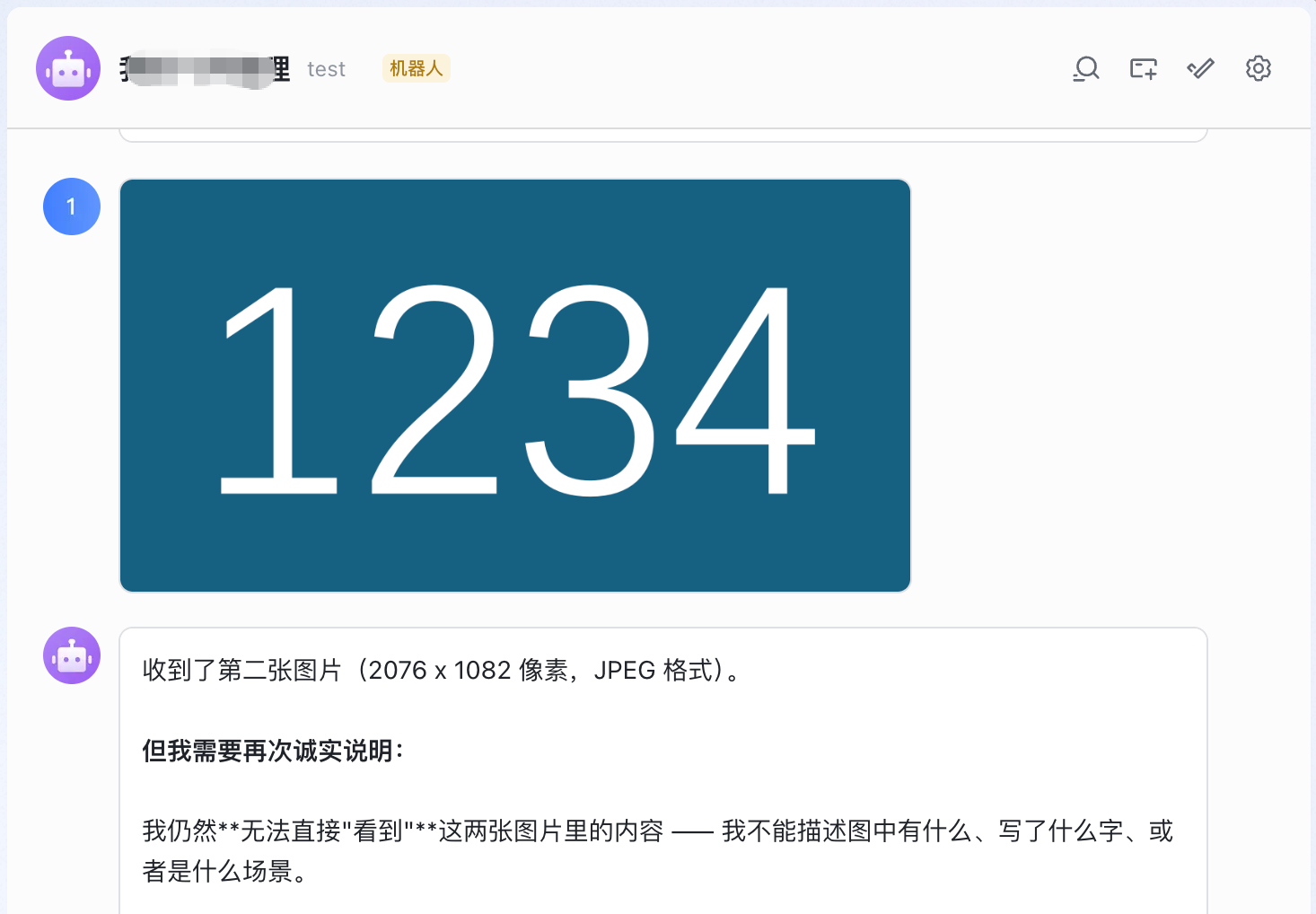
飞书机器人可以接收图片、文件、音频、视频,示例如下:
提示:此处飞书仅作为发送/接收信息的通道,实际能否完成任务会受到模型能力限制。例如您需要为OpenClaw配置支持理解分析图片的模型,才能让OpenClaw通过飞书接收图片并且进行分析。

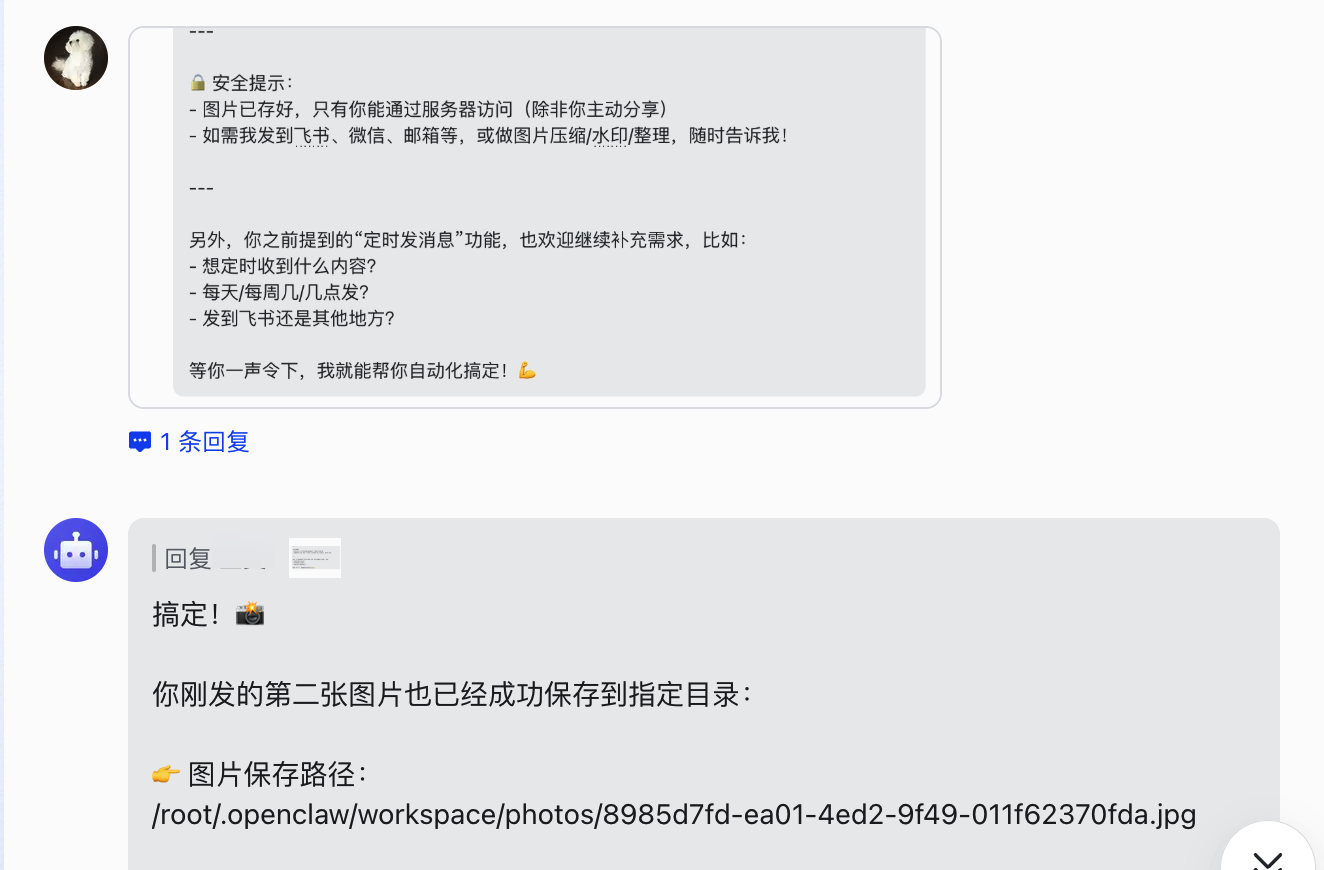
飞书机器人可以回复图片、文件、音频,示例如下:
提示:飞书仅作为发送/接收信息的通道,实际能否完成任务会受到模型能力限制。例如您需要为OpenClaw配置支持生成图片的模型,才能让OpenClaw生成图片并通过飞书发送图片。

飞书机器人可以主动发动消息(如定时发送提醒),示例如下:
提示:此处飞书仅作为发送/接收信息的通道,实际能否完成任务会受到模型能力限制。
文档工具:读取、创建、用 Markdown 写入飞书文档(表格因 API 限制不支持)。
知识库工具:浏览、列出空间、获取节点详情、搜索/创建/移动/重命名节点。

云盘工具:展示文件夹、获取文件信息、创建文件夹、移动/删除文件。
更多教程
更多云上OpenClaw实践教程,如一键部署OpenClaw、接入QQ/企微/钉钉/飞书/Discord/Telegram/WhatsApp、安装并使用Skills等,欢迎查看玩转OpenClaw|云上OpenClaw(Clawdbot)一键秒级部署指南。
加入我们的 Discord 群组!
扫描二维码加入 OpenClaw 用户讨论群,解锁并交流在云端使用 OpenClaw 的经验。探索与 Telegram、Discord、WhatsApp、QQ、钉钉、企业微信和 Lark 等应用集成后的各种实用有趣的用法!

🚀 开发者社区与支持
1️⃣ OpenClaw 开发者社区
在 Discord 解锁更多进阶技巧
👉 点击一键加入社群
提示: 加入后即可获取最新的插件模板和部署手册
2️⃣ 专属技术支持
加入 WhatsApp / 企业微信获取专属技术支持
| 渠道 | 扫码 / 点击加入 |
|---|---|
| WhatsApp 频道 |  |
| 企业微信 |  |
🔗 了解更多请访问官方页面:腾讯云 OpenClaw